Method for efficiently judging false target of vehicle-mounted radar
A vehicle-mounted radar and false target technology, applied in the field of target tracking, can solve the problems such as the false target track cannot be truly identified, the target tracking is unstable, and the tracking is discontinuous. Effects of Continuity and Stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
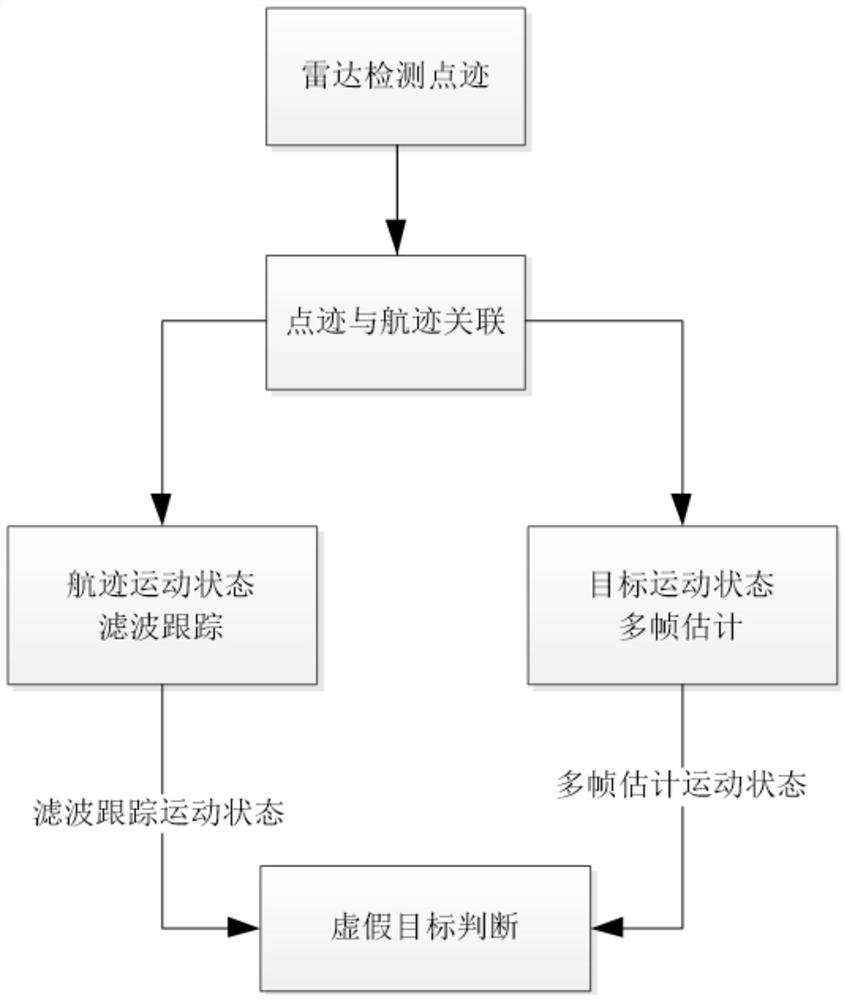
[0026] The vehicle-mounted radar false target efficient judgment method in the present embodiment comprises the following steps,
[0027] S1: The vehicle-mounted radar detects the target track, and enters the target track tracking state after track initiation, track association, and track matching;
[0028] S2: Use the Kalman filter algorithm to track and obtain the target's current position x_filter, y_filter, driving speed vx_filter, vy_filter and driving acceleration ax_filter, ay_filter;
[0029] S3: Use multi-frame dot traces to directly estimate the target's driving speed Speed_optimized;
[0030] S4: Comparing the filter values vx_filter, vy_filter and the estimated value Speed_optimized, if the preset condition is met, it is determined that the current target is a false target.
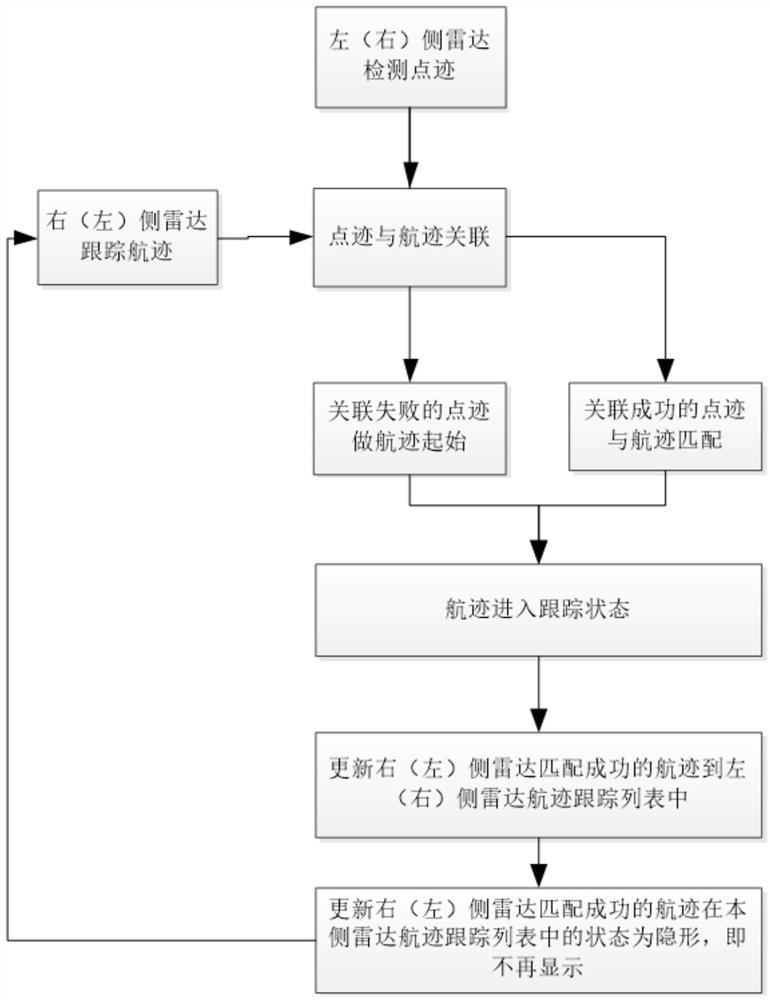
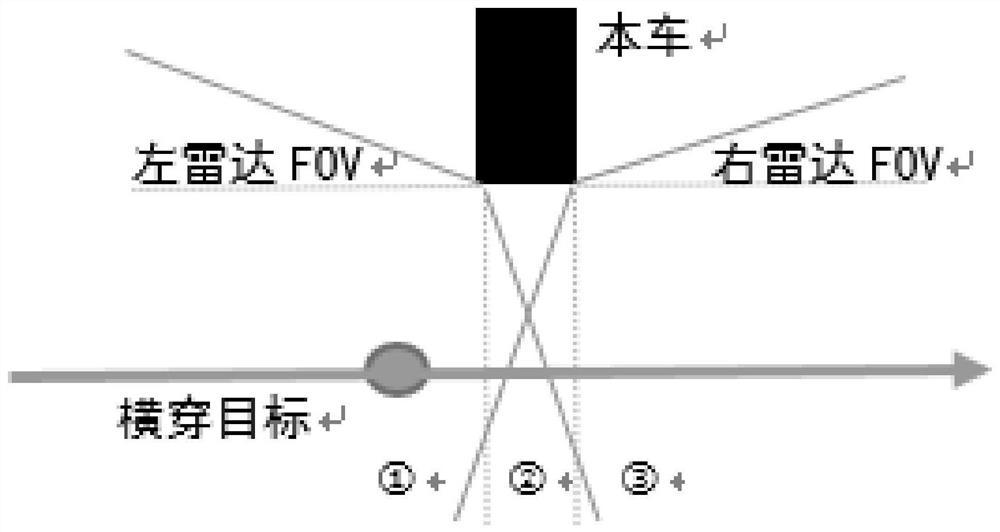
[0031] Preferably, in step S1, the vehicle-mounted radar includes a left-side vehicle-mounted radar disposed on the left side of the vehicle, and a right-side vehicle-mounted radar disposed...
Embodiment 2
[0038] The vehicle-mounted radar false target efficient judgment method in the present embodiment comprises the following steps,
[0039] S1: The vehicle-mounted radar detects the target track, and enters the target track tracking state after track initiation, track association, and track matching;
[0040] S2: Use the Kalman filter algorithm to track and obtain the target's current position x_filter, y_filter, driving speed vx_filter, vy_filter and driving acceleration ax_filter, ay_filter;
[0041] S3: Use multi-frame dot traces to directly estimate the target's driving speed Speed_optimized;
[0042] S4: Comparing the filter values vx_filter, vy_filter and the estimated value Speed_optimized, if the preset condition is met, it is determined that the current target is a false target.
[0043] Preferably, in step S1, the vehicle-mounted radar includes a left-side vehicle-mounted radar disposed on the left side of the vehicle, and a right-side vehicle-mounted radar disposed...
Embodiment 3
[0055] The vehicle-mounted radar false target efficient judgment method in the present embodiment comprises the following steps,
[0056] S1: The vehicle-mounted radar detects the target track, and enters the target track tracking state after track initiation, track association, and track matching;
[0057] S2: Use the Kalman filter algorithm to track and obtain the target's current position x_filter, y_filter, driving speed vx_filter, vy_filter and driving acceleration ax_filter, ay_filter;
[0058] S3: Use multi-frame dot traces to directly estimate the target's driving speed Speed_optimized;
[0059] S4: Comparing the filter values vx_filter, vy_filter and the estimated value Speed_optimized, if the preset condition is met, it is determined that the current target is a false target.
[0060] In step S1, the vehicle-mounted radars on both sides carry out target tracking and fusion through the steps in Embodiments 1 and 2; in step S3, directly estimating the driving speed ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com