Automatic driving method and system capable of recognizing road conditions and vehicle
An automatic driving and vehicle technology, applied in the field of systems and vehicles, and automatic driving methods, can solve problems such as vehicle bumps, affecting occupant comfort, and increased suspension wear, so as to achieve the effect of improving comfort and reducing vehicle failures
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
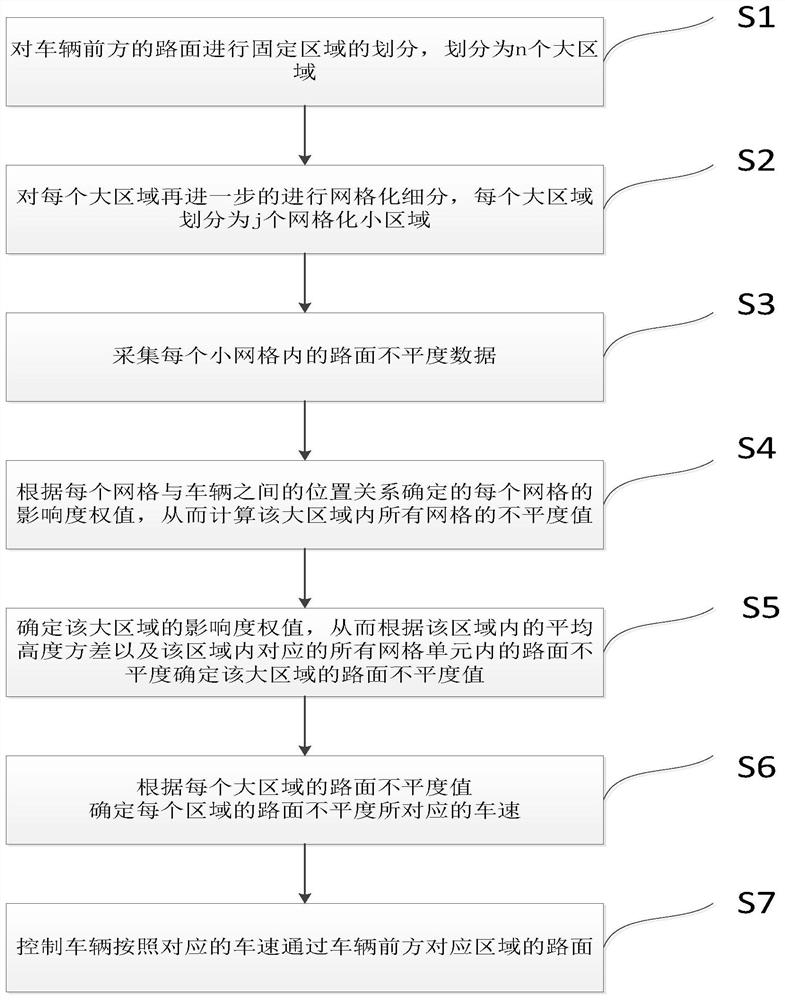
[0034] figure 1 is a control flowchart of an automatic driving method according to an embodiment of the present invention. In one embodiment, such as figure 1 shown. An automatic driving method capable of recognizing road conditions, mainly comprising the following steps:
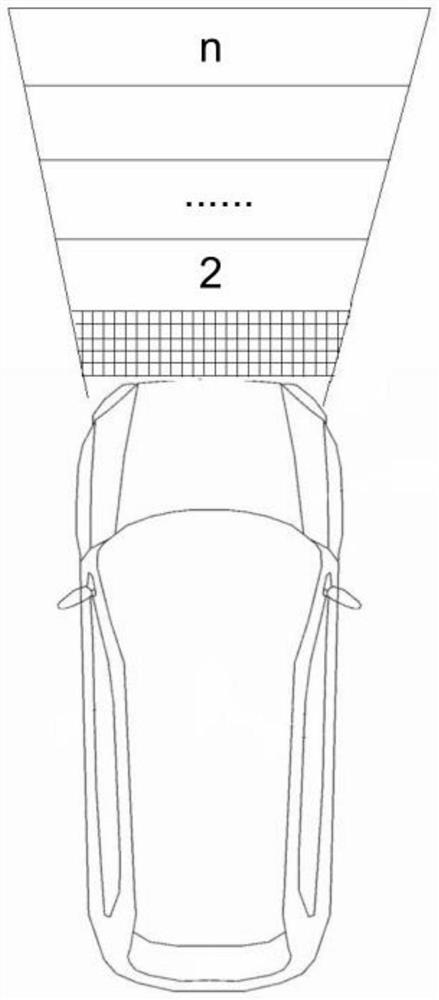
[0035] S1. Divide the road surface in front of the vehicle into fixed areas, and divide the road surface ahead into n large areas according to the equidistance division method;
[0036] S2. Carry out further grid subdivision for each large area, and divide each large area into j gridded square areas according to equidistant form;
[0037] S3. Collect the road surface roughness data in each small grid through the vehicle detection module, and calculate the collected data, so as to obtain the roughness information of the grid;
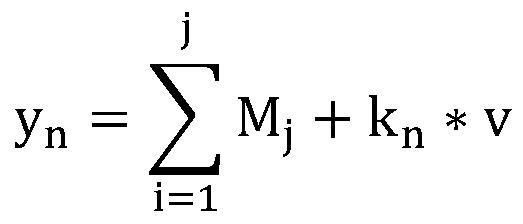
[0038] S4. Calculate the roughness information of all grids in the large area by determining the influence weight of each grid according to the positional relationship between eac...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com