Bronchoscope robot and guiding method and system thereof
A bronchoscope and guidance system technology, applied in the field of medical devices, can solve problems such as difficulty, blocking the closure of the glottis, serious complications, etc., and achieve the effect of avoiding the wrong way
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
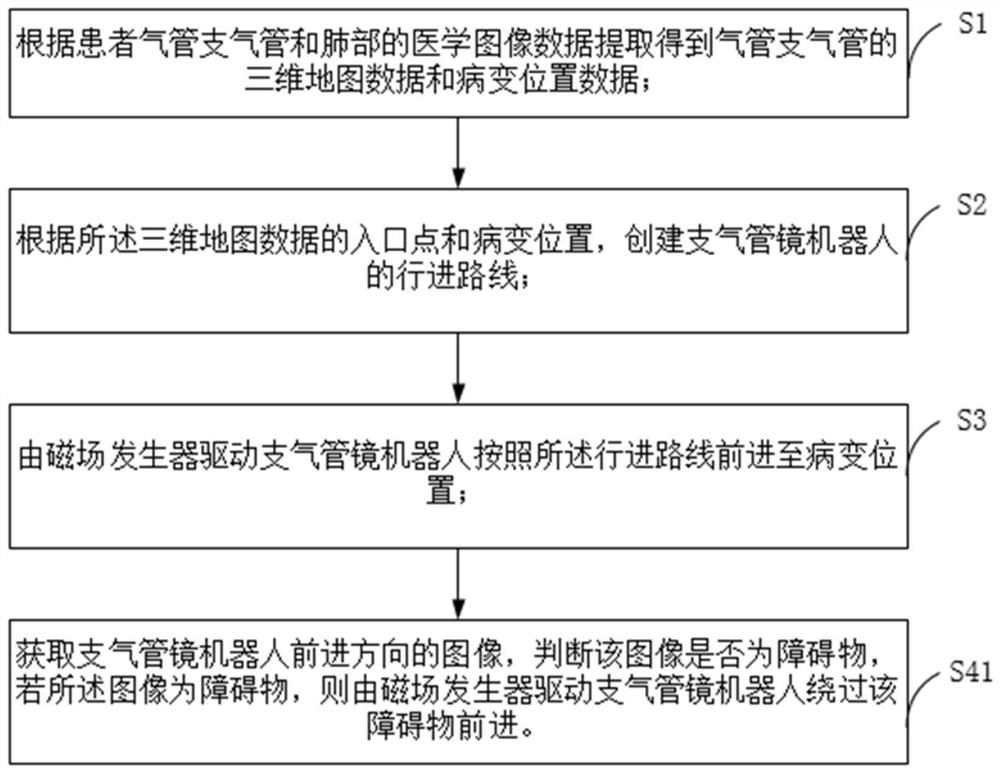
[0040] Please refer to figure 1 , an embodiment of the present invention provides a bronchoscopic robot guidance method, comprising the following steps:
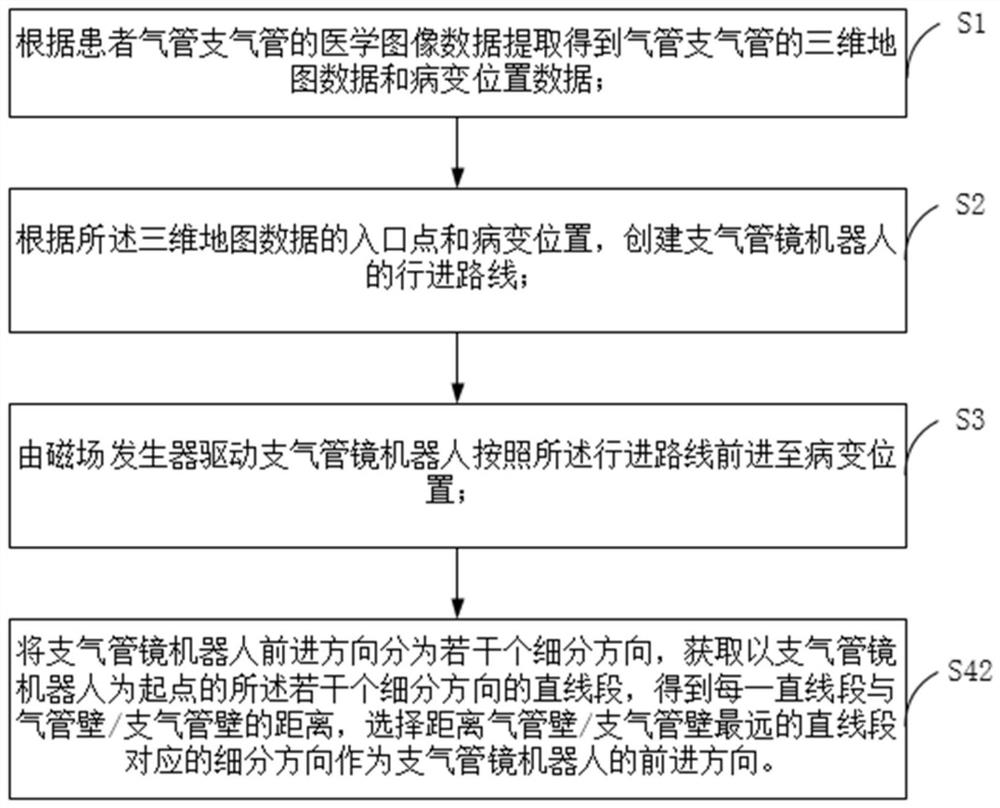
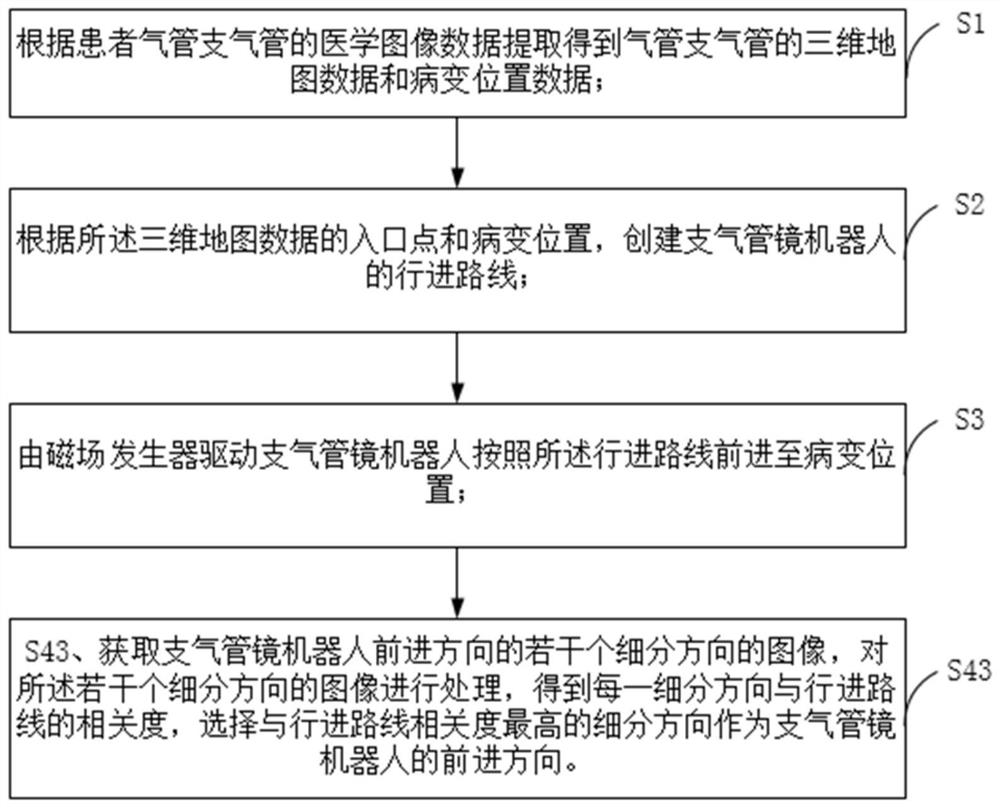
[0041] S1. According to the medical image data extraction of the patient's trachea, bronchi and lungs, the three-dimensional map data and lesion location data of the trachea and bronchi are obtained;
[0042] S2. According to the entry point and lesion position of the three-dimensional map data, create a travel route of the bronchoscopic robot;
[0043] S3. The bronchoscopic robot is driven by the magnetic field generator to advance to the lesion position according to the traveling route;
[0044] S41. Acquire an image of the advancing direction of the bronchoscope robot, and judge whether the image is an obstacle. If the image is an obstacle, the magnetic field generator drives the bronchoscope robot to go around the obstacle.
[0045] An embodiment of the present invention provides a method for guiding a bronchoscopic ro...
Embodiment 2
[0055] An embodiment of the present invention provides a bronchoscope robot, where the bronchoscope robot is guided by the bronchoscope robot guiding method.
[0056] As a specific implementation, the bronchoscopic robot is provided with a camera, and at least one of a biopsy forceps, a puncture needle and a suction pipeline.
[0057] Among them, the camera is used to cooperate with automatic exposure control to provide clear and bright clinical images with a large field of view, the biopsy forceps are used to take pathological specimens, and the puncture needle is used to sample the tissue in the trachea.
[0058] The specific implementation process of the second embodiment has been described in detail in the first embodiment, so it will not be repeated here.
Embodiment 3
[0060] Please refer to Figure 4 , an embodiment of the present invention provides a bronchoscopic robotic guidance system, comprising:
[0061] The data extraction module is used to extract the three-dimensional map data and lesion location data of the trachea and bronchi according to the medical image data of the patient's trachea and lungs;
[0062] A route creation module, configured to create a route for the bronchoscopic robot according to the entry point and lesion position of the three-dimensional map data;
[0063] The computer module is used to control the magnetic field generator to drive the bronchoscope robot to advance to the lesion position according to the traveling route;
[0064] The image acquisition module is used to acquire the image of the advancing direction of the bronchoscope robot;
[0065] The computer module is also used to judge whether the image is an obstacle, and if the image is an obstacle, the magnetic field generator drives the bronchoscopi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com