Robot walking control method and system, robot and readable storage medium
A walking control and robot technology, applied in control/adjustment systems, non-electric variable control, three-dimensional position/channel control, etc., can solve problems such as low accuracy and achieve the effect of improving traversal efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0047] The present invention will be described in detail below in conjunction with various embodiments shown in the drawings. However, these embodiments do not limit the present invention, and any structural, method, or functional changes made by those skilled in the art according to these embodiments are included in the protection scope of the present invention.
[0048] The robot system of the present invention can be a mowing robot system, a sweeping robot system, a snowplow system, a leaf suction machine system, a golf course ball picker system, etc. Each system can automatically walk in the working area and perform corresponding work. In the specific example of the invention, the robotic system is taken as an example for mowing the lawn. Correspondingly, the working area may be a lawn.
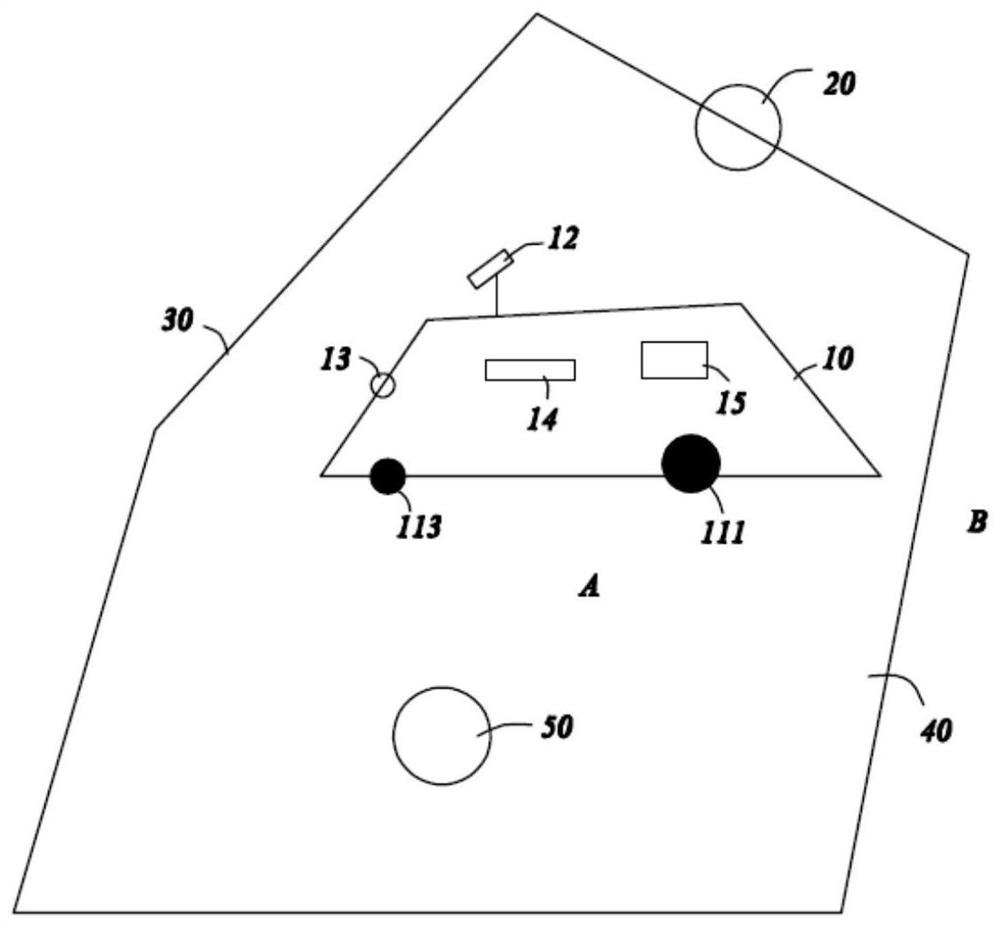
[0049] Such as figure 2 As shown, the mowing robot system of the present invention includes: a mowing robot (RM), a charging station 20, and a boundary 30.
[0050]The mowing robot inc...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com