Method and terminal for making physical robot actions
A robot and entity technology, applied in the direction of instruments, simulators, program control, etc., can solve the problems of the complex structure of the entity robot, increase the difficulty and cost of production, and high requirements, and achieve convenient and fast physical robot action production method, saving The effect of the action production cycle
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0097] Please refer to figure 1 , Embodiment 1 of the present invention is:
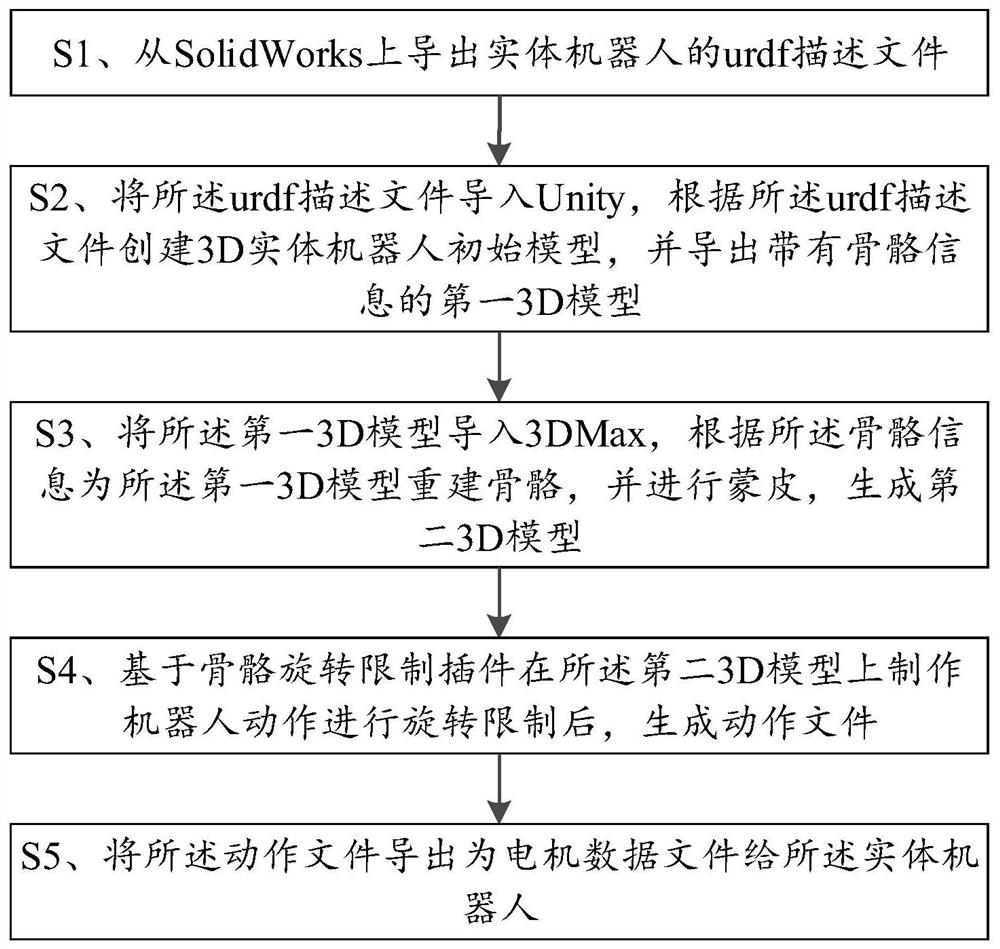
[0098] A method for making an action of a physical robot, comprising the steps of:
[0099] S1. Export the urdf description file of the solid robot from SolidWorks;
[0100] S2. Import the urdf description file into Unity, create a 3D solid robot initial model according to the urdf description file, and export the first 3D model with skeleton information;
[0101] S3. Importing the first 3D model into 3DMax, rebuilding the skeleton for the first 3D model according to the skeleton information, and performing skinning to generate a second 3D model;
[0102] S4. Based on the bone rotation limitation plug-in, the robot action is made on the second 3D model to perform rotation limitation, and an action file is generated;
[0103] S5. Export the action file as a motor data file to the physical robot.
[0104] That is, in this embodiment, the physical robot executes the action corresponding to the motor...
Embodiment 2
[0105] Please refer to figure 1 , the second embodiment of the present invention is:
[0106] A method for making a physical robot action, on the basis of the first embodiment above, in this embodiment, importing the urdf description file into Unity in step S2 is specifically:
[0107] Create a new Unity project, import the Ros-Sharp project code, and use the Import Robot From Urdf tool to import the urdf description file into the Unity project.
[0108] That is, in this embodiment, the Ros-Sharp open source project is used to realize the function of importing the urdf description file into Unity, and the Import Robot From Urdf tool of Ros-Sharp is used to import the urdf description file and assemble it into a 3D solid robot initial model, so as to realize subsequent simulation Features.
[0109] Wherein, the first 3D model with bone information exported in step S2 is specifically:
[0110] Use Unity's FBX Exporter plug-in to export the first 3D model with bone information...
Embodiment 3
[0133] Please refer to figure 2 , the third embodiment of the present invention is:
[0134] A terminal 1 for making physical robot actions, including a memory 2, a processor 3, and a computer program stored in the memory 2 and operable on the processor 3. The processor 3 implements the first embodiment or implementation of the above-mentioned embodiment when executing the computer program. Steps in any embodiment of Example 2.
[0135] In summary, the present invention provides a method and terminal for making physical robot actions, importing the urdf description file of the physical robot into Unity through Solidworks to create a corresponding 3D model, and using 3DMax to perform bone skinning on the 3D model , so as to make the robot motion in 3DMax, by exporting the generated motion file as a motor data file that can be provided to the real robot side to execute the expression, the overall has the following beneficial effects:
[0136] 1. It stipulates the process of c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com