Hand-simulated pneumatic soft dexterous hand
A dexterous hand and human-like technology, applied in the field of human-like pneumatic soft dexterous hands, can solve the problems of non-independent deformation of finger segments, small working space of soft hands, poor integration, etc., to achieve improved integration and low air consumption , Increase the effect of working space
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The technical solutions in the present invention will be clearly and completely described below in conjunction with the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only part of the embodiments of the invention, not all of them. Based on the present invention All other embodiments obtained by persons of ordinary skill in the art without creative efforts, all belong to the scope of protection of the present invention.
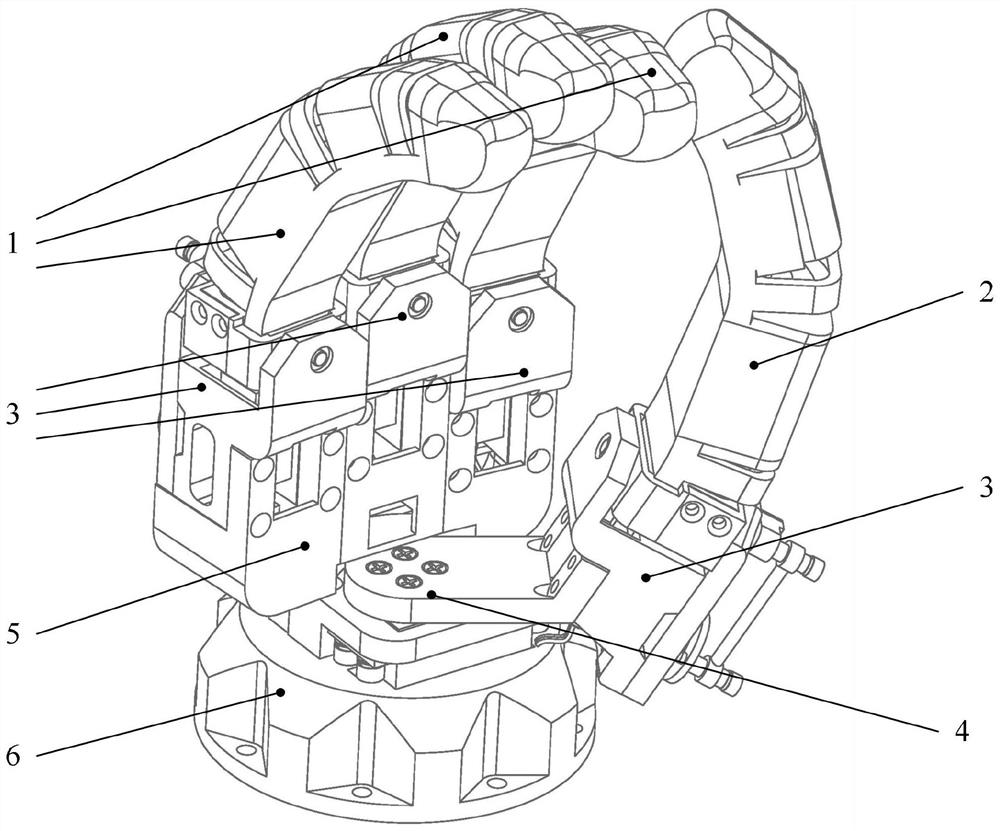
[0023] A pneumatic software dexterous hand imitating a human hand, comprising a thumb base joint 4, a finger mounting frame 5, a plurality of fingers 1 and a wrist flange 6; the plurality of fingers 1 are all multi-joint soft fingers, and at least include a thumb 2 , index finger, middle finger and ring finger, to improve the interchangeability of components; the root of the thumb 2 is connected with the finger mounting frame 5 through the thumb base joint 4, and the roots of other fingers 1 ex...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com