


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Vehicle formation driving method
A vehicle driving and vehicle technology, which is applied in traffic flow detection and other directions, can solve problems such as manual work, decreased tracking accuracy, and increased driver workload, so as to achieve the effect of ensuring vehicle driving safety, ensuring the scope of application, and meeting actual needs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
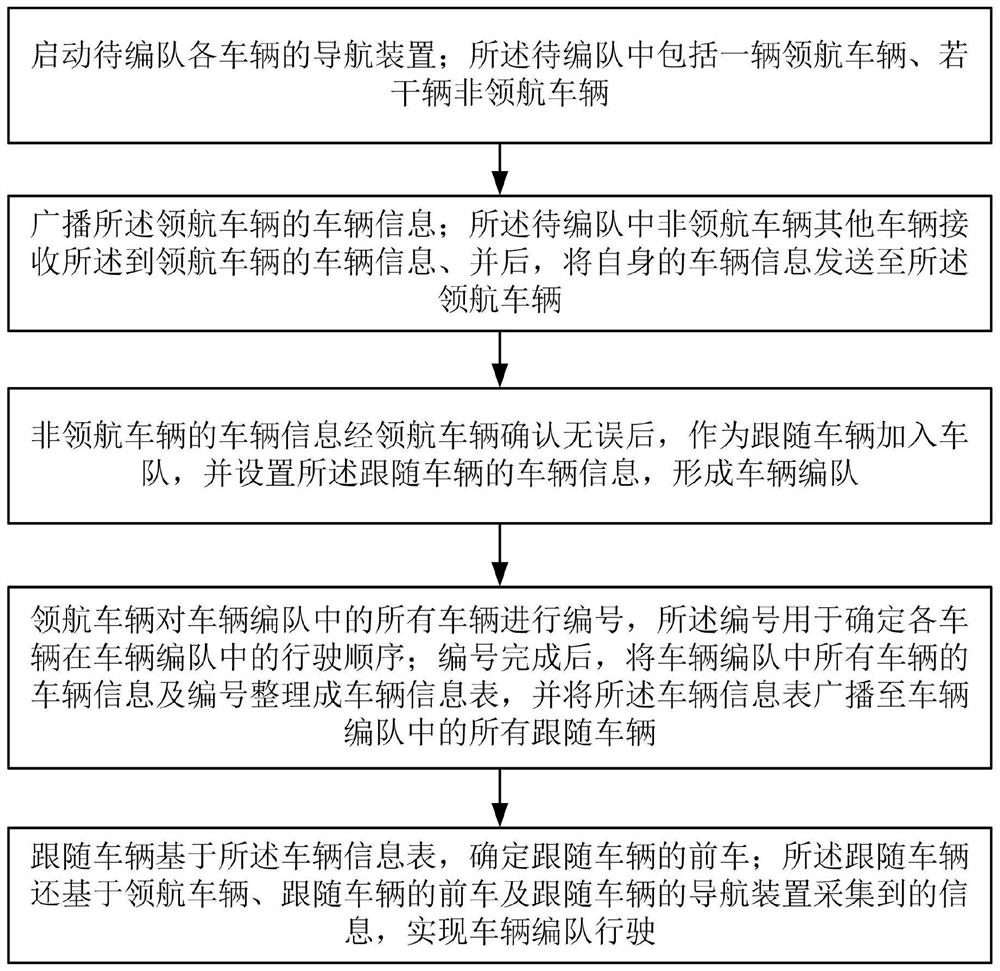
[0056] Embodiment 1 of the present invention discloses a vehicle formation driving method, the flow chart is as follows figure 1 shown, including the following steps:
[0057] Step S11: Start the navigation device of each vehicle to be formed; the formation to be formed includes one pilot vehicle and several non-lead vehicles;
[0058] Step S12: broadcasting the vehicle information of the pilot vehicle; the non-pilot vehicle receives the vehicle information of the pilot vehicle and sends its own vehicle information to the pilot vehicle;
[0059] The vehicle information at least includes: license plate number, driving destination, vehicle driving status, status of the navigation device, and vehicle type; wherein, the vehicle driving status includes: not joining a fleet, joining a fleet; wherein, the vehicle type includes: Leading vehicle, following vehicle; It should be noted that in the vehicle information of non-leading vehicles, the default vehicle type; when it joins the f...
Embodiment 2
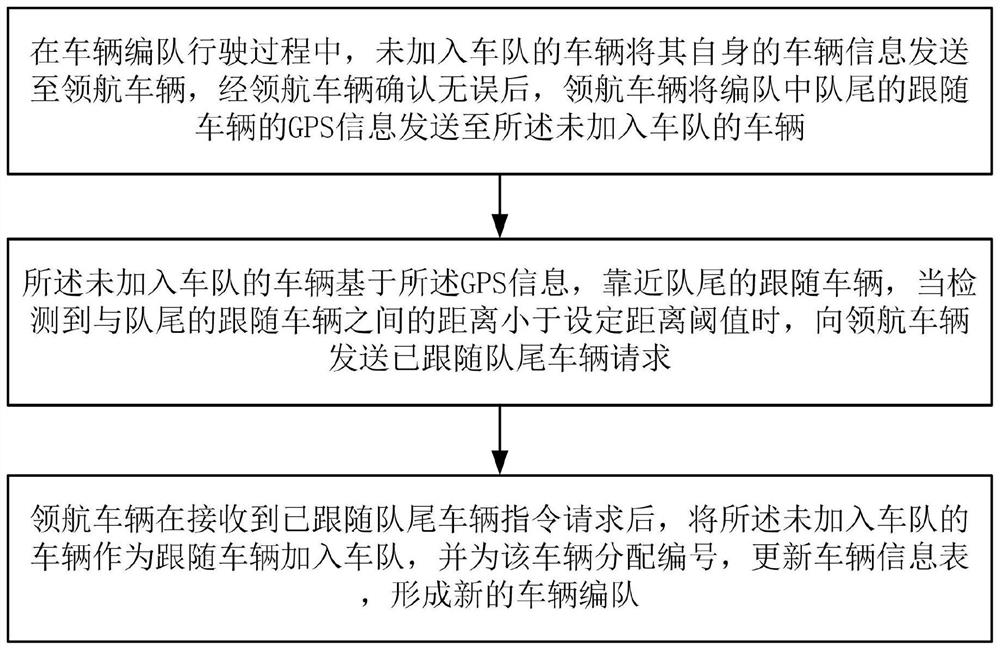
[0098] Considering that during the driving process of the vehicle formation, there may also be a situation that a vehicle whose driving status is not joining the fleet wants to join the vehicle formation. In order to solve this problem, further improvement is made on the basis of Embodiment 1. In addition to the relevant content of Embodiment 1, the improved vehicle formation driving method also includes the steps in Embodiment 2. The flow chart is as follows image 3 As shown, the specific description is as follows:
[0099] Step S21: During the driving process of the vehicle formation, the vehicles that have not joined the convoy send their own vehicle information to the lead vehicle. After the lead vehicle confirms that it is correct, the lead vehicle sends the GPS information of the following vehicle at the end of the formation to the unattended vehicle. Vehicles joining the fleet;
[0100] Step S22: Based on the GPS information, the vehicle that has not joined the convoy...
Embodiment 3
[0106] Considering that during the process of vehicle formation driving, following vehicles may also exit the vehicle formation due to navigation device failure or other reasons. In order to solve this problem, on the basis of embodiment 1 or embodiment 2, the improved vehicle formation driving method may also include the steps in embodiment 3, the flow chart is as follows Figure 4 As shown, the specific description is as follows:
[0107] Step S31: During the driving process of the vehicle formation, the leading vehicle periodically receives the vehicle dynamic driving information reported by the following vehicles;
[0108] The dynamic driving information of the vehicle includes the driving state of the vehicle and the information of the vehicle in front collected by the vehicle; the information of the vehicle in front collected by the vehicle is: the distance information from the vehicle in front or the driving track of the vehicle in front;
[0109] Step S32: If the lead...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com