A digital twin-based optimal trajectory generation method and system
A trajectory generation, digital technology, applied in control/adjustment systems, two-dimensional position/channel control, instruments, etc., can solve problems such as unrealistic collision prediction, time overhead, and difficulty in applying obstacles to work scenarios, achieving both efficiency and efficiency. , Improve performance and improve work accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
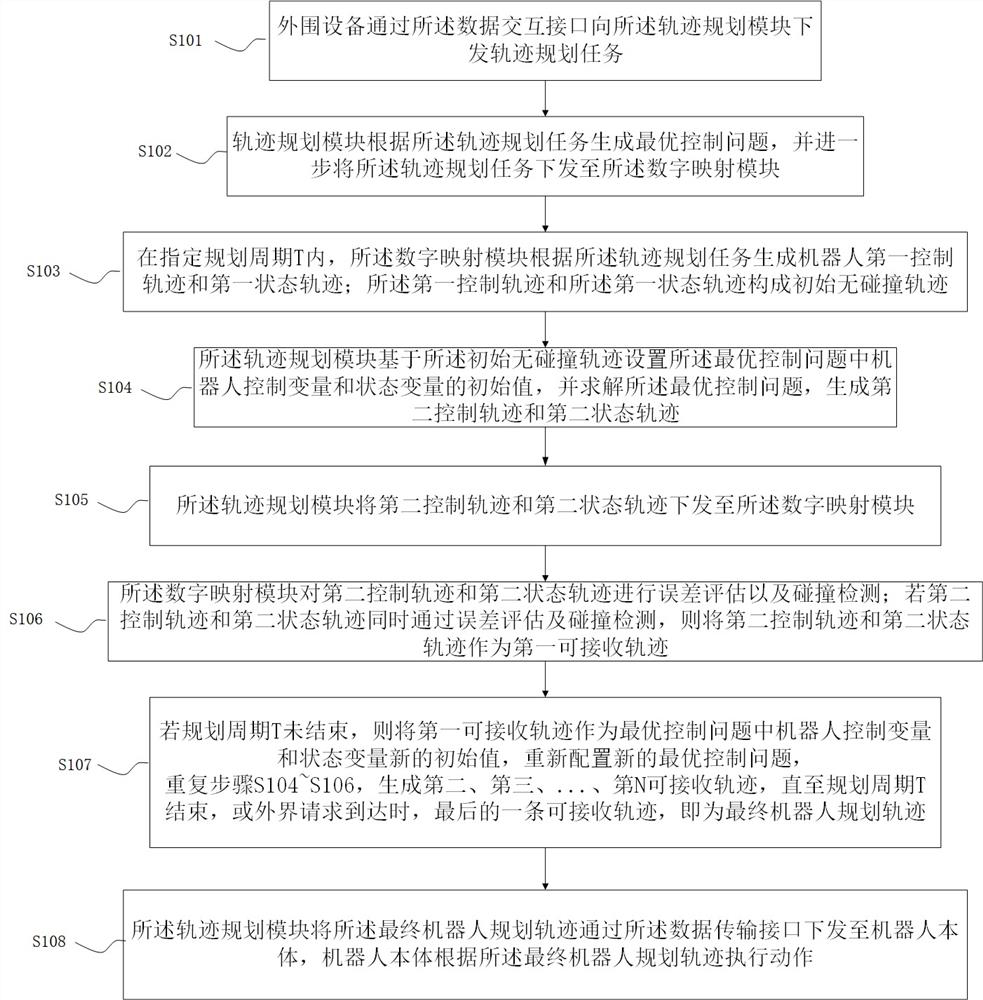
[0028] In order to make the purpose, technical solution and advantages of the present invention clearer, the embodiments of the present invention will be further described below in conjunction with the accompanying drawings.
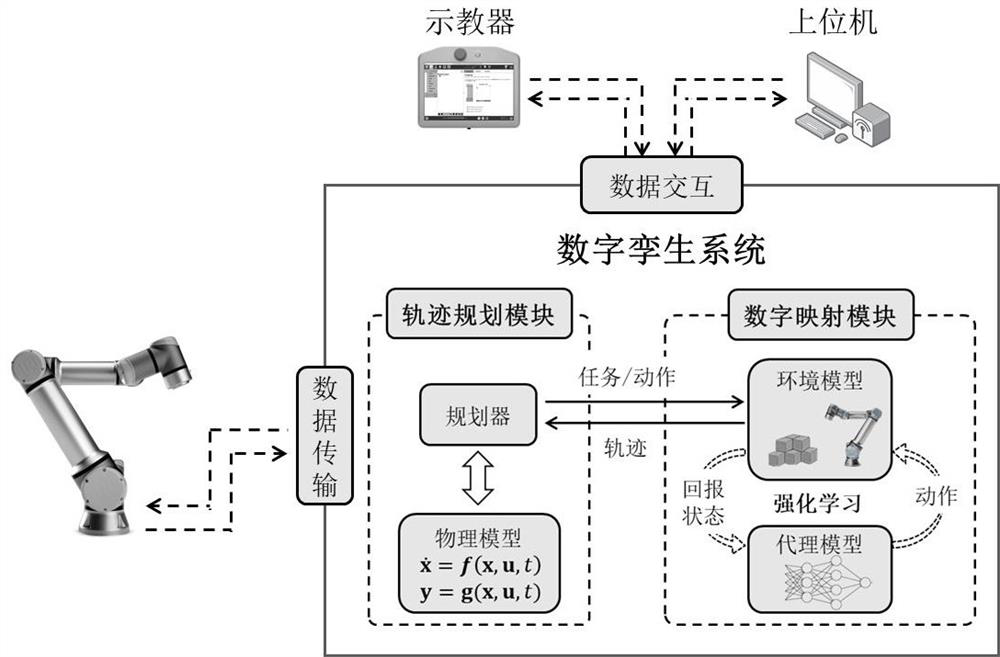
[0029] Please refer to figure 1 , figure 1 It is a system structure diagram of the present invention applied to industrial robots; the present invention provides an optimal trajectory generation system based on digital twins, including: data transmission interface, data interaction interface, trajectory planning module and digital mapping module;
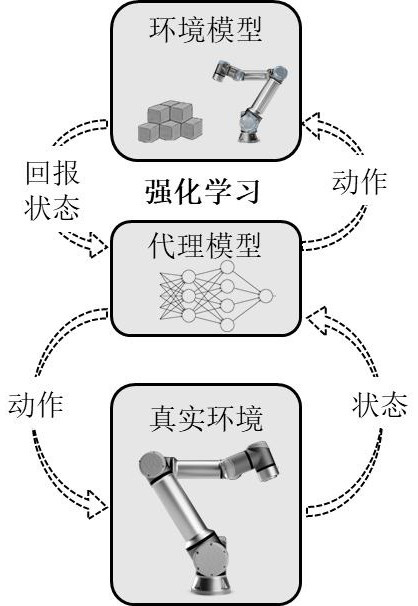
[0030] The trajectory planning module includes: a planner component and a robot physical model component; the digital mapping module includes: an environment model and an agent model;
[0031] Among them, one of the main functions of the data transmission interface is to obtain the current state information of the robot, such as joint angular displacement, angular velocity, angular acceleration, etc. These st...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com