Adaptive dynamic window unmanned vehicle real-time obstacle avoidance method based on danger coefficient
A technology of dynamic window and risk factor, which is applied in motor vehicles, non-electric variable control, control/regulation systems, etc., can solve the problems of inability to adjust the evaluation coefficient and insufficient obstacle avoidance ability, and achieve good real-time obstacle avoidance and overcoming obstacle avoidance The effect of incapacity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0053] The technical solution of the present invention will be specifically described below in conjunction with the accompanying drawings.
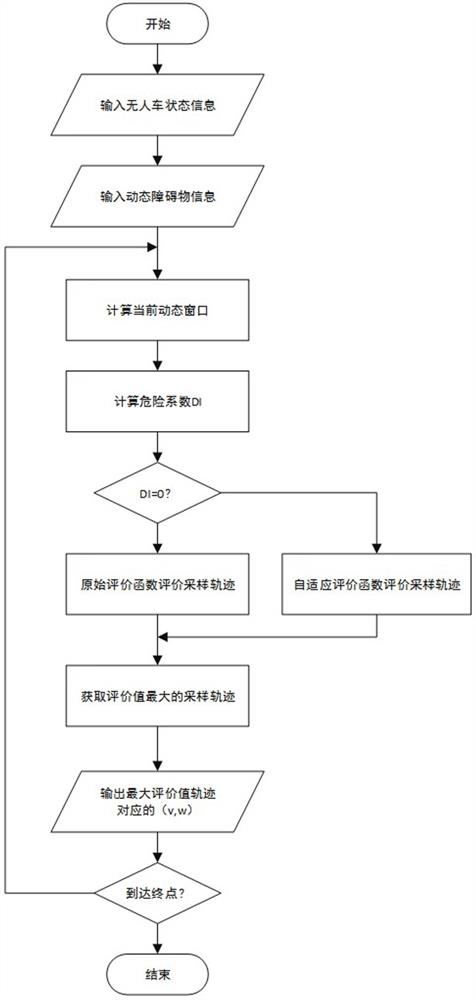
[0054] Such as figure 1 As shown, a kind of self-adaptive dynamic window unmanned vehicle real-time obstacle avoidance method based on risk factor of the present invention comprises the following steps:
[0055] S1. Initialize the status information of the unmanned vehicle;
[0056] S2. Acquiring the state information of the dynamic obstacle through the sensor;
[0057] S3. Calculate the reachable dynamic velocity vector window according to the linear velocity and angular velocity in the sampled state information of the unmanned vehicle;
[0058] S4. Establishing the risk factor of the dynamic obstacle according to the obtained state information;
[0059] S5. Judging whether to start obstacle avoidance according to the risk factor;
[0060] S6. If obstacle avoidance is required, the evaluation parameters are adaptively adjusted accord...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com