A Dynamic Path Planning Method for Spacecraft Cluster
A technology of dynamic paths and spacecraft, applied in the direction of aerospace vehicles, aerospace vehicle guidance devices, motor vehicles, etc., can solve problems such as ignoring the three-dimensional environment, ignoring environmental obstacles, etc., to achieve optimal fuel consumption and improve The effect of reducing the search radius and search range
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0047] The present invention will be further described in detail below with reference to specific embodiments, which are to explain rather than limit the present invention.
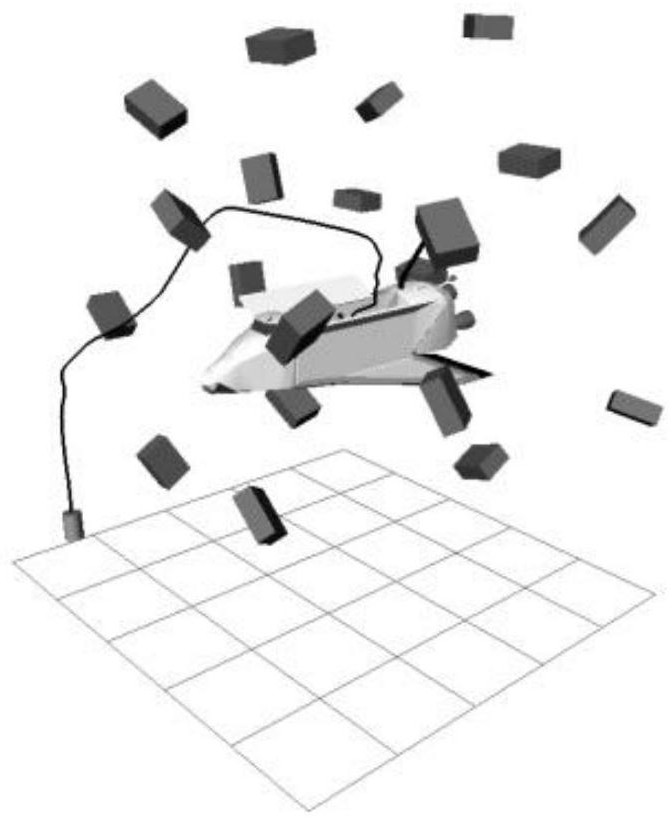
[0048] like figure 1 , when the spacecraft cluster completes the space mission, it is necessary to carry out reasonable path planning for the spacecraft cluster. Path planning first needs to consider how the target point changes with time; secondly, it needs to consider the environmental obstacles that the spacecraft cluster needs to avoid in the process of reaching the target point; The member spacecraft are all within the communication range; finally, it is necessary to consider whether the planned path designed for the spacecraft cluster is better, and its performance indicators are generally that the maximum maneuverability of each pulse maneuver does not exceed the upper limit of the spacecraft and the total fuel consumption is optimal. .
[0049] The dynamic path planning method for a spacecraft c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com