Dance balance control method, device and biped robot for biped robot
A biped robot, balance control technology, applied in the direction of program control manipulator, manipulator, manufacturing tools, etc., can solve the problem of long time, difficult robot dynamic stability, etc., and achieve the effect of strong anti-interference ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
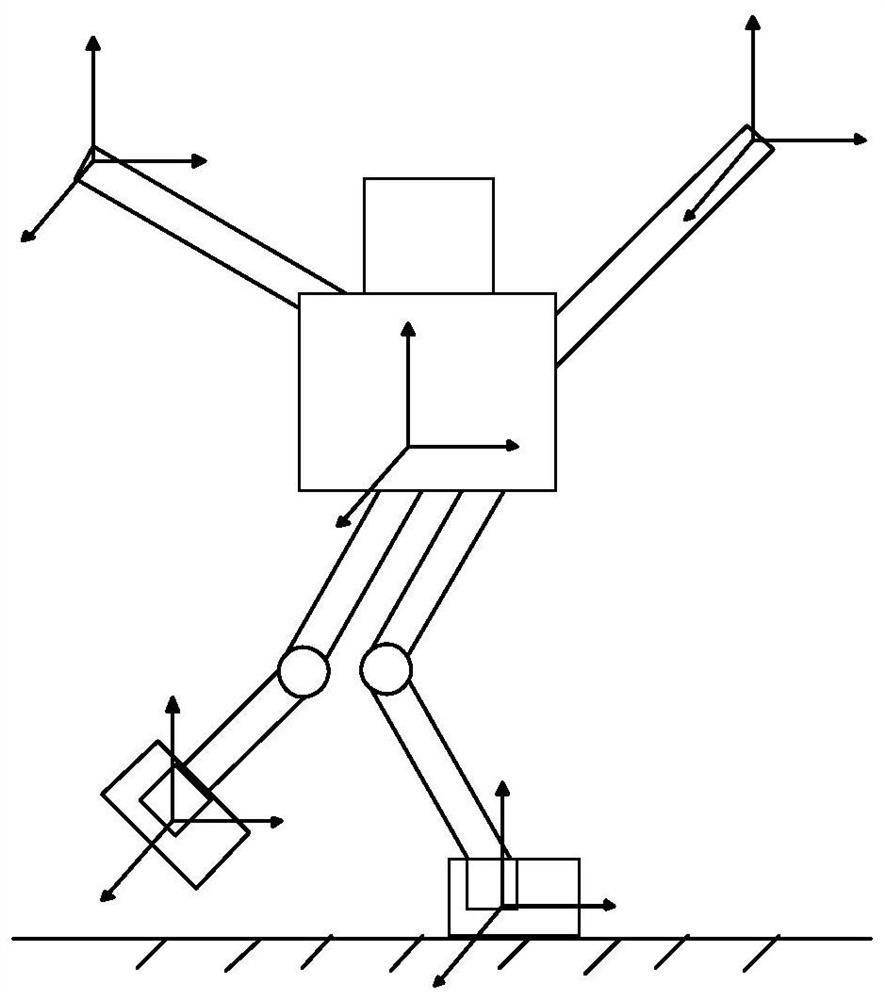
[0053] Please refer to figure 1 and 2 , this embodiment proposes a dance balance control method for a biped robot, which can be applied to figure 1 The robot dancing scene shown. This method performs balance control based on ZMP and momentum, which can realize the stability of the biped robot under the dance action tracking.
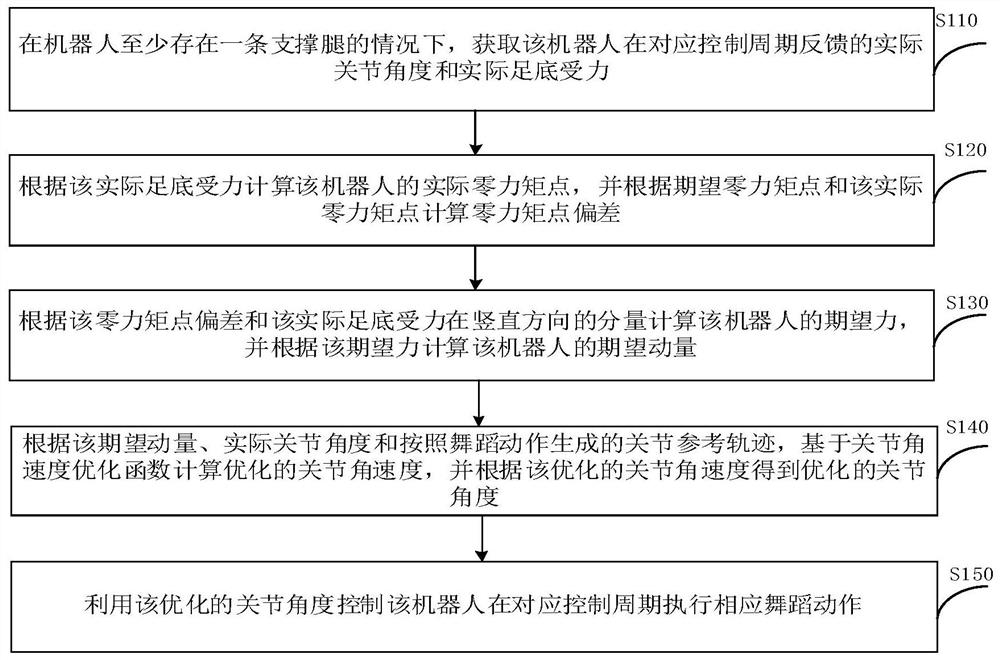
[0054] Exemplarily, as figure 2 As shown, the dance balance control method of the biped robot includes:
[0055] Step S110 , in the case that the robot has at least one support leg, obtain the actual joint angle and the actual sole force fed back by the robot in the corresponding control period.
[0056] In this embodiment, when the biped robot body performs dance movements, it will always ensure that at least one leg is in a supporting state (referred to as a supporting leg), and the supporting leg will be in the original position, that is, no positional movement will occur. It can be understood that, at certain moments, the support leg of the rob...
Embodiment 2
[0119] Please refer to Figure 5 , Based on the method of the above-mentioned Embodiment 1, this embodiment provides a dance balance control device 100 for a biped robot. Exemplarily, the dance balance control device 100 for a biped robot includes:
[0120] The obtaining module 110 is configured to obtain the actual joint angle and the actual plantar force fed back by the robot in the corresponding control period when the robot has at least one support leg.
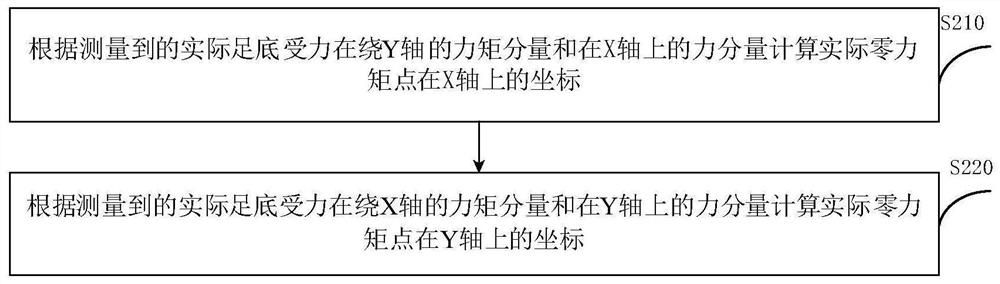
[0121] The deviation calculation module 120 is configured to calculate the actual zero-moment point of the robot according to the actual foot force, and calculate the zero-moment point deviation according to the expected zero-moment point and the actual zero-moment point.
[0122] The momentum calculation module 130 is configured to calculate the expected force of the ankle of the robot according to the deviation of the zero moment point and the component of the actual foot force in the vertical direction, and calculate t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com