Rapid selection and registration method for 3D laser radar point cloud data prediction points
A technology of point cloud data and laser radar, which is applied in the field of rapid selection and registration of 3D laser radar point cloud data prediction points, can solve problems such as slow construction speed, influence of selected prediction points, error amplification, etc., and achieve great reference value, The effect of improving the overall registration speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The specific implementation manners of the present invention will be further described in detail below in conjunction with the drawings and embodiments (taking the 3D mapping of the scene in area A as an example).
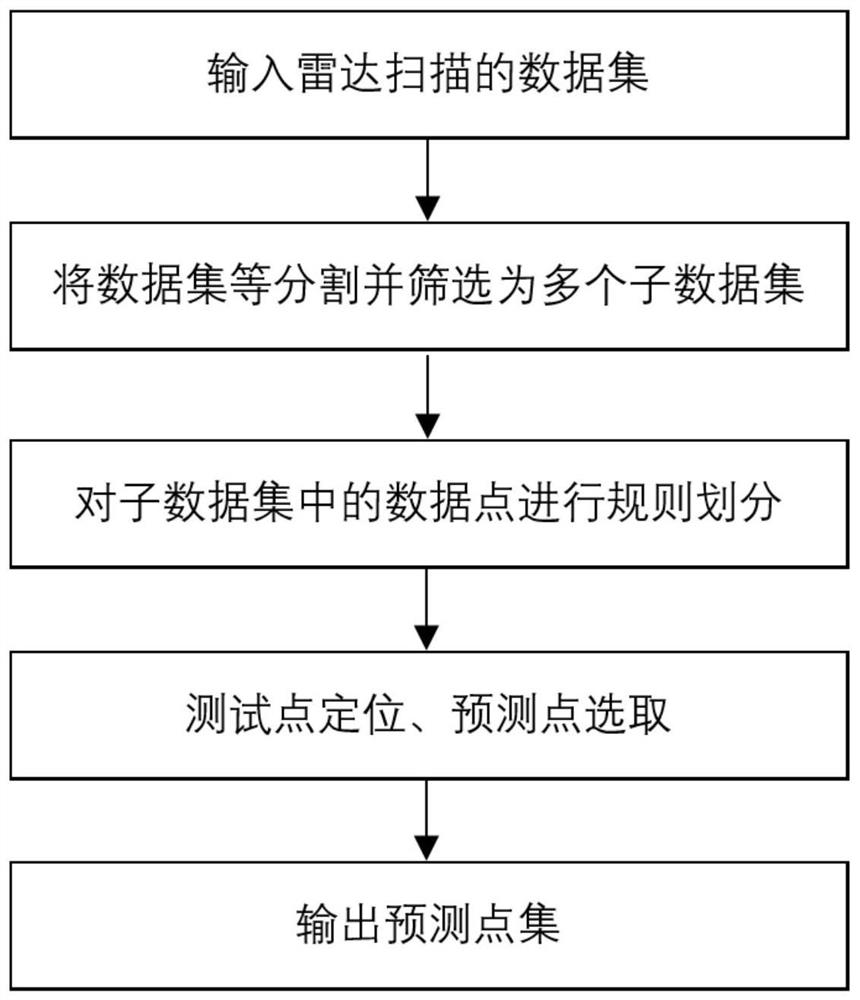
[0030] refer to Figure 1 ~ Figure 2 A method for quickly selecting and registering points predicted from 3D lidar point cloud data, comprising the following steps:
[0031] Step 1: First scan the area A with a 3D lidar to obtain the point cloud data point set Φ of the area A, and use the point cloud data set Φ as an input item;
[0032] Step 2: Divide the point cloud dataset Φ into 100 sub-data point sets Φ i (i=1,...,100), filter and retain the sub-point set Φ that meets the conditions (the number of data points in the sub-data point set > 3) j (j=1,...,95) are used to participate in point set registration;
[0033]
[0034] Where: S (Φ′) Indicates the sum of all point sets participating in point set registration;
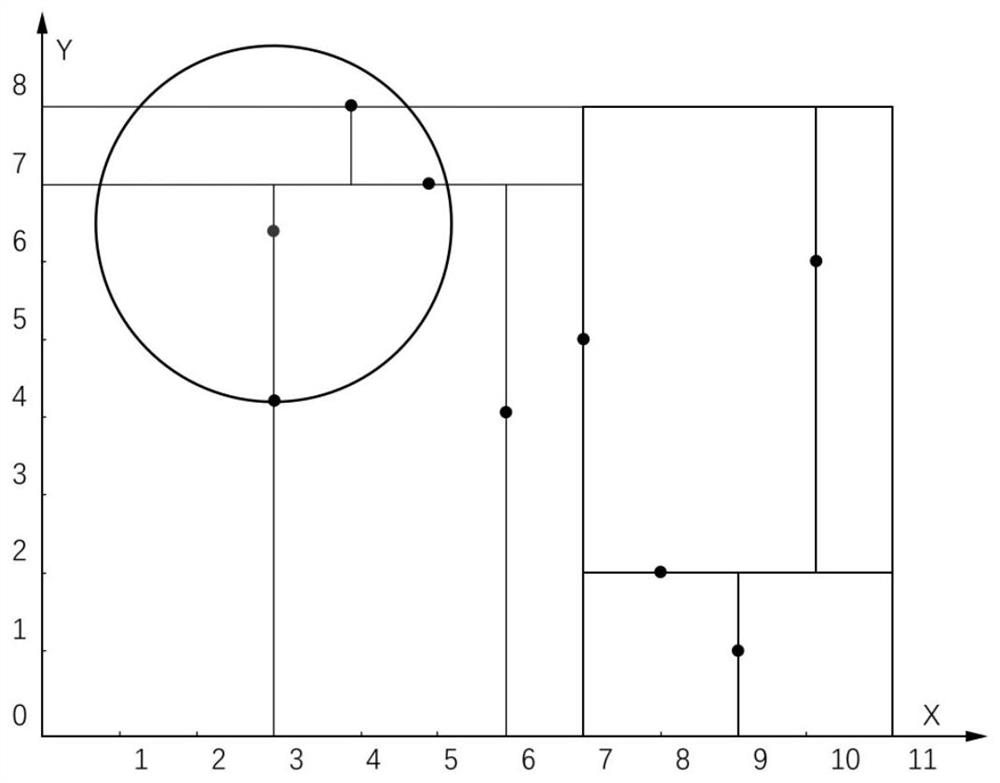
[0035] Step 3: Analyze the sub-p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com