


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Motion parameter estimation combination smoothing filtering method based on GM-PHD
A technology of smooth filtering and motion parameters, applied in the field of information fusion, can solve problems such as inaccurate target state estimation, influence and interference, sensor perception link errors, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0035] The concept of multi-target tracking was proposed as early as 1955, and gradually developed into an important branch in the field of multi-source information fusion. With the emergence of radar, sonar, infrared and other sensors and the continuous development of technology, multi-target tracking technology has been widely used in military and civilian fields, such as ballistic missile defense system, military reconnaissance and early warning, precision guidance, video surveillance , air traffic control, intelligent robots.
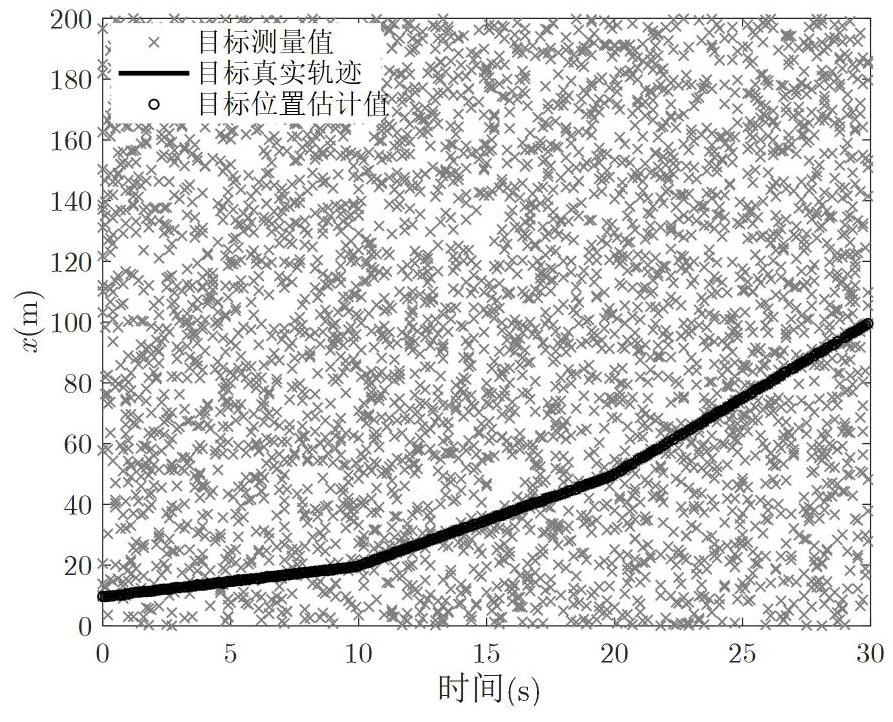
[0036] The existing GM-PHD filtering method has been widely used in recent years. This method usually shows good tracking performance when the preset speed is close to the real speed of the target. However, in actual situations, the tracking environment is complex and the speed information It is often impossible to know. If the speed is unknown or has a large difference from the real one, the state parameters will not match and the state estimation ...
Embodiment 2
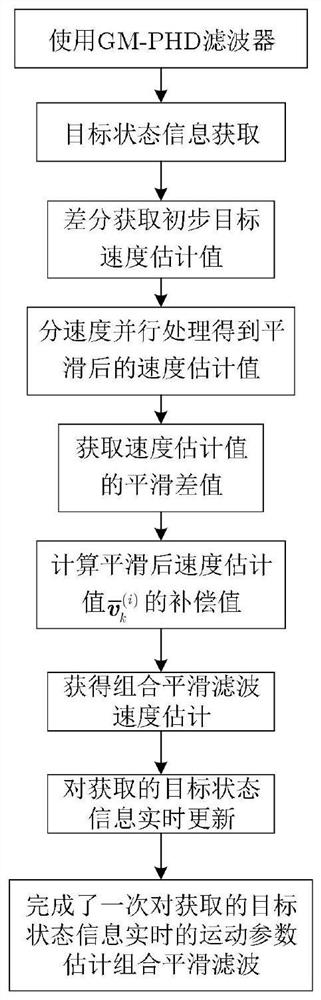
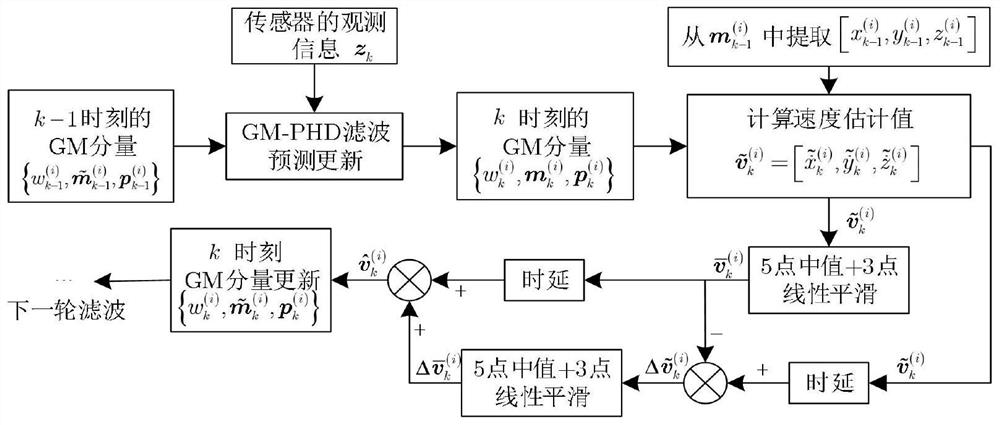
[0062] The motion parameter estimation combined smoothing filter method based on GM-PHD is the same as embodiment 1, and the target speed estimate value of the differential calculation i target described in step 3 includes the following steps:
[0063] 3.1 Obtain the target state position information at time k-1 and time k: use the Gaussian mixture GM component of the target state at time k-1 of target i and the Gaussian mixture GM component of the target state at time k Among them, only from Extract the state position information of i target k-1 time from and from Extract the state position information of i target k time from
[0064] The present invention extracts the relatively accurate state position information of the same target at different times, and prepares for the subsequent acquisition of a more accurate target speed estimation value. The state position information is distinguished according to the Cartesian three-dimensional coordinate direction, and is...
Embodiment 3
[0077] The motion parameter estimation combined smoothing filtering method based on GM-PHD is the same as embodiment 1-2, and the initial target speed estimate value described in step 4 is smoothed, wherein, the 3-point linear smoothing window selects 3 regressions of the Hamming window. Normalize the non-zero weights 0.25, 0.5, 0.25 as the value of ω(m).
[0078] The selection of the 3-point linear smoothing window function in the present invention can have a variety of optional windows, such as rectangular windows, Hanning windows, Hamming windows, Blackman windows, Gaussian windows and the like.
[0079] In this example, the Hamming window is used. Considering that the combined smoothing filter system should respond as quickly as possible to environmental speed changes, the window length should not be set too long, so three normalized non-zero weights 0.25, 0.5, and 0.25 are selected as ω(m ), a better smoothing effect is obtained.
[0080] The invention discloses a GM-PHD...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com