


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
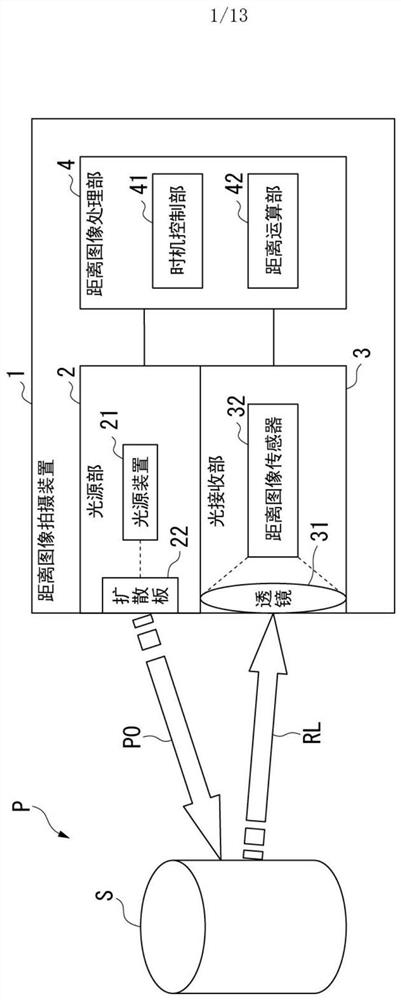
Range image sensor and range image pickup device
A distance image and sensor technology, which is applied in the field of distance image sensors and distance image capture devices, can solve the problem of inaccurate measurement of the distance between the measuring device and the object
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 approach
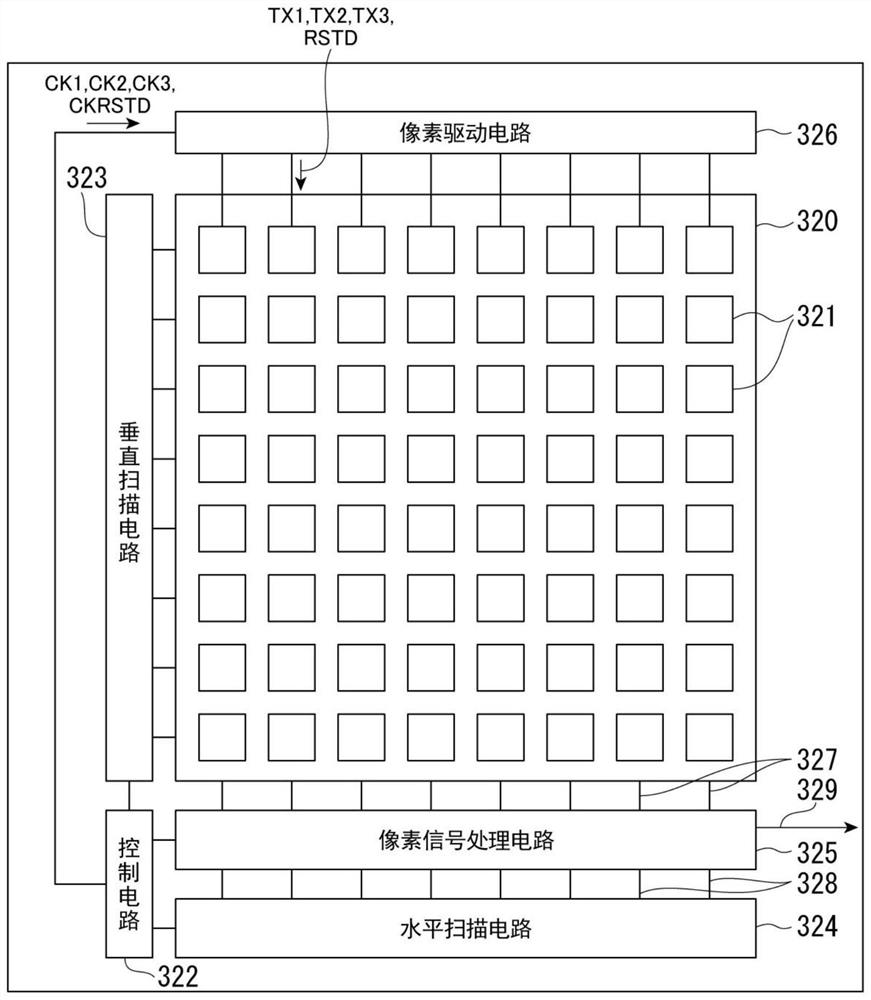
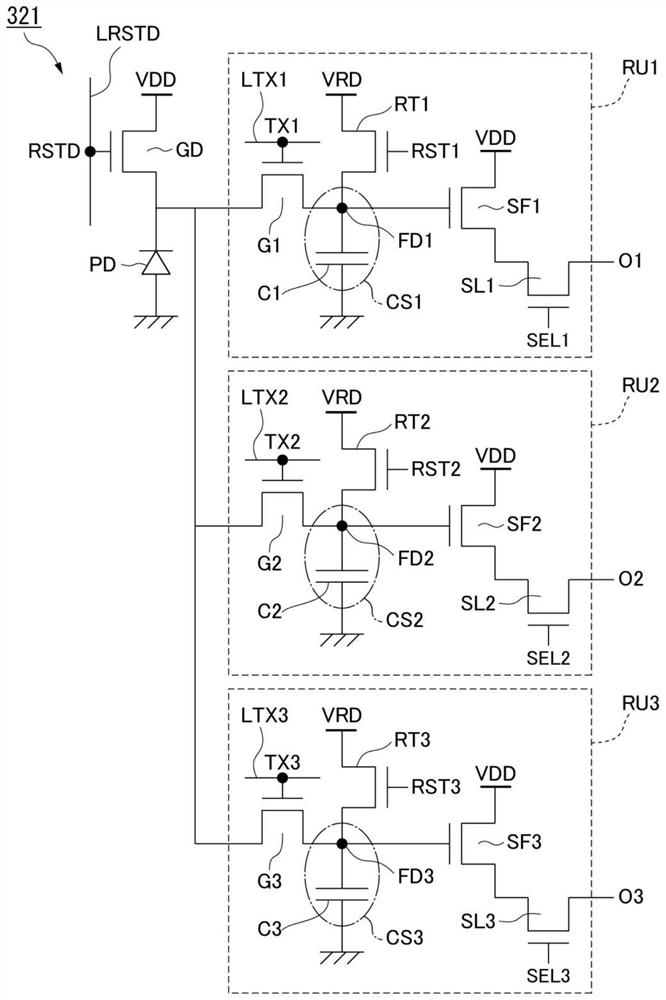
[0118] In general, in order to accurately measure the distance to the subject in the distance image sensor, all the pixel circuits 321 in the light-receiving pixel unit 320 are driven at the same timing within the accumulation period in accordance with the global shutter method. That is, each of the accumulation drive signals TX1 , TX2 , and TX3 and the reset drive signal RSTD is supplied to all the pixel circuits 321 arranged in a grid pattern at the same timing.
[0119] Therefore, for example, the peak current is transiently increased and greatly increased so that the gates of the readout gate transistors G1 of all the pixel circuits 321 in the light-receiving pixel unit 320 are at the "H" level at the same timing. Due to the transient increase of the peak current, the above-described ringing occurs, and the individual charges from the pixel circuits 321 cannot be accurately read out. The above-mentioned problem also arises when the other storage drive signals TX1 , TX2 , a...
no. 2 approach
[0175] Hereinafter, a second embodiment of the present invention will be described with reference to the drawings. Figure 10 It is a diagram illustrating a configuration example of a pixel driving circuit 326 that drives the pixel circuits 321 in units of columns among the pixel circuits 321 arranged in a grid in the light-receiving pixel unit 320 in the present embodiment. exist Figure 5 In the case of the above embodiment, the group of the timing adjustment circuit 326C_j and the driver circuit 326D_j in the pixel driving circuit 326 is divided into two equal groups G1 and G2. On the other hand, in the present embodiment, the group of the timing adjustment circuit 326C_j and the driver circuit 326D_j in the pixel driving circuit 326 is divided into three or more groups.
[0176] In this embodiment, in the timing adjustment circuit 326C_j and the driver circuit 326D_j group forming each group, the timing adjustment circuit 326C_j connected in series within the group suppli...
no. 3 approach
[0183] Hereinafter, a third embodiment of the present invention will be described with reference to the drawings. Figure 11 It is a diagram illustrating a configuration example of a pixel driving circuit 326 that drives the pixel circuits 321 in units of columns among the pixel circuits 321 arranged in a grid in the light-receiving pixel unit 320 in the present embodiment.
[0184] In this embodiment, the driver circuits 326D_j in the driver unit 326D of the pixel drive circuit 326 are divided into a plurality of groups, for example, n groups, and each group is provided with one timing adjustment circuit 326C_n (n is the number of groups). Therefore, the input terminals of the driver circuits 326D_j in each group are connected in a common manner through the connection point Q, and the corresponding timing adjustment circuit C_n supplies the clock signal CK to each of the driver circuits 326D_j in each group at the same timing. For example, in the case of group Gk (1≤k≤n), the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com