A real-time motion compensation method for 3D point cloud of lidar based on imu
A laser radar and three-dimensional point cloud technology, applied in radio wave measurement systems, instruments, etc., can solve the problem of unsatisfactory three-axis position change estimation, and achieve high real-time performance and robustness, three-axis angular velocity and linear acceleration accurate effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
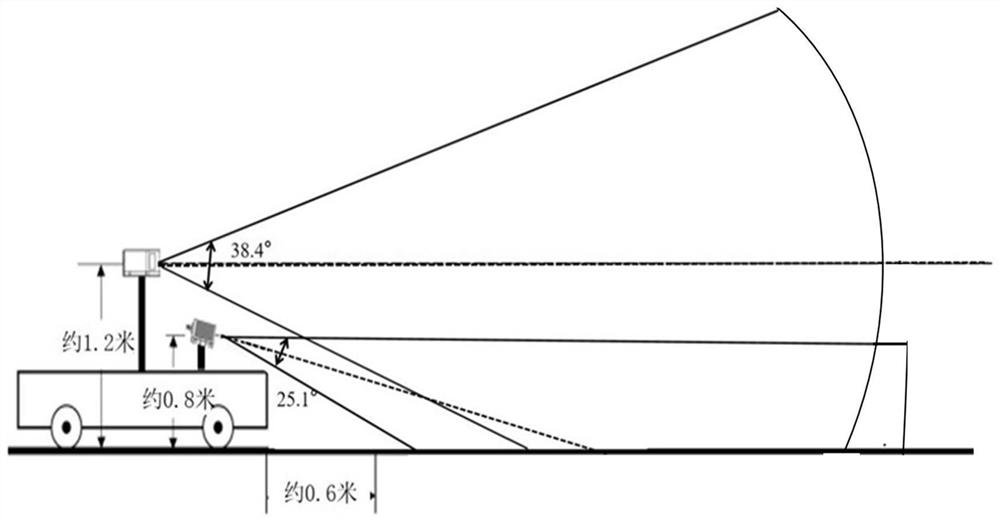
[0131] Such as figure 1 As shown, through the analysis of the parameters of the two lidars in the manual, the Horizon has a higher point cloud coverage in the field of view. It is installed directly in front of the experimental vehicle. Since the vertical viewing angle of the Horizon is 25.1°, the Horizon will It is installed with a downward inclination of about 12.5°, which makes the upper limit of Horizon's vertical viewing angle close to the horizontal, which can effectively deal with low-altitude and ground obstacles and maintain a high detection distance. Compared with the Horizon radar, the Mid-100 radar has a larger field of view, especially the vertical field of view reaches 38.4°, so it is installed horizontally on the top of the experimental vehicle, and the IMU is built into the Horizon, which saves the IMU and Horizon calibration steps.
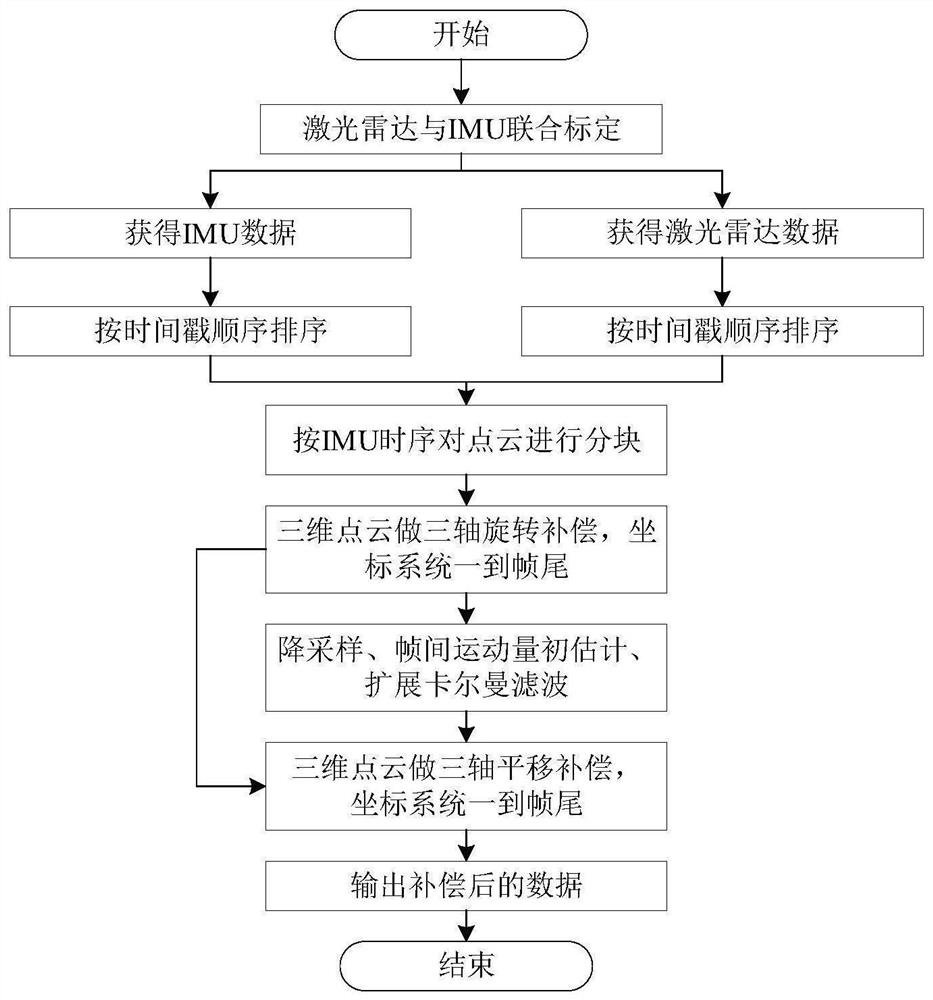
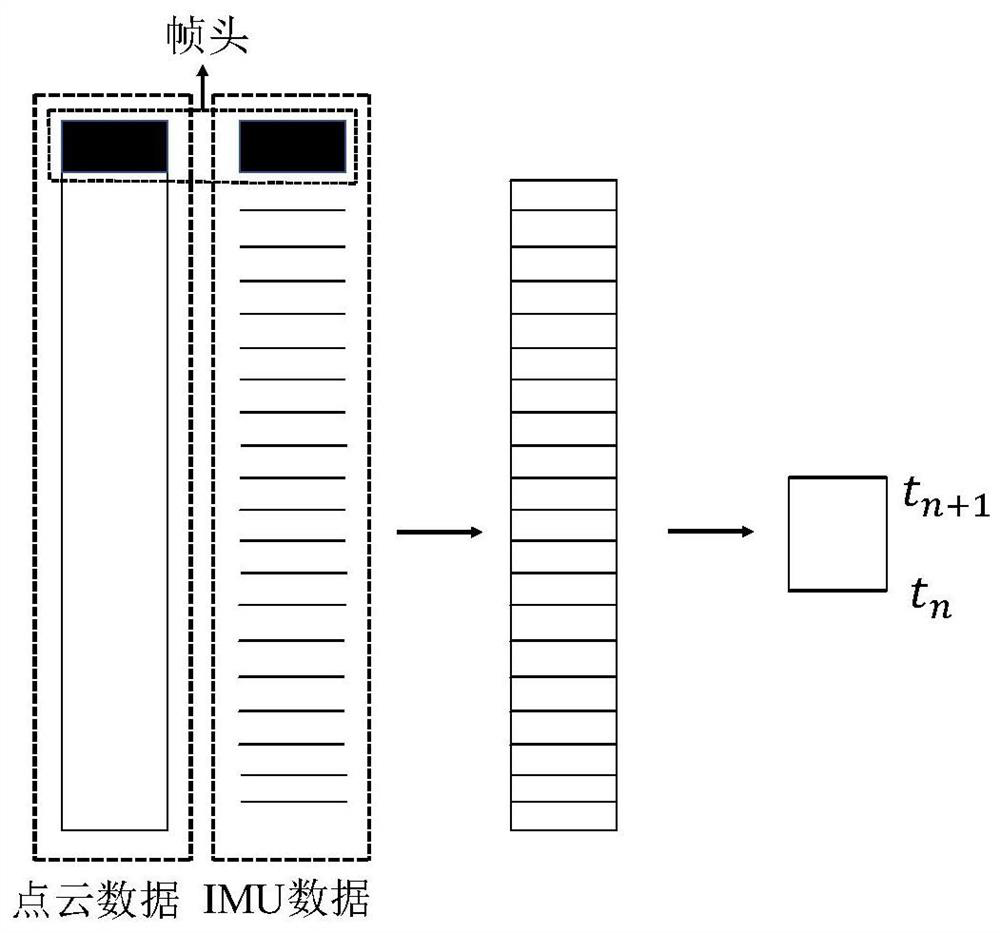
[0132] According to the sampling frequency of the IMU, the lidar 3D point cloud data is divided into blocks
[0133] Such as ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com