


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Full-coverage path planning method and system of robot, electronic equipment and medium
A path planning and robot technology, applied in the field of robotics, can solve the problem of low path repetition rate robot steering performance requirements and other issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
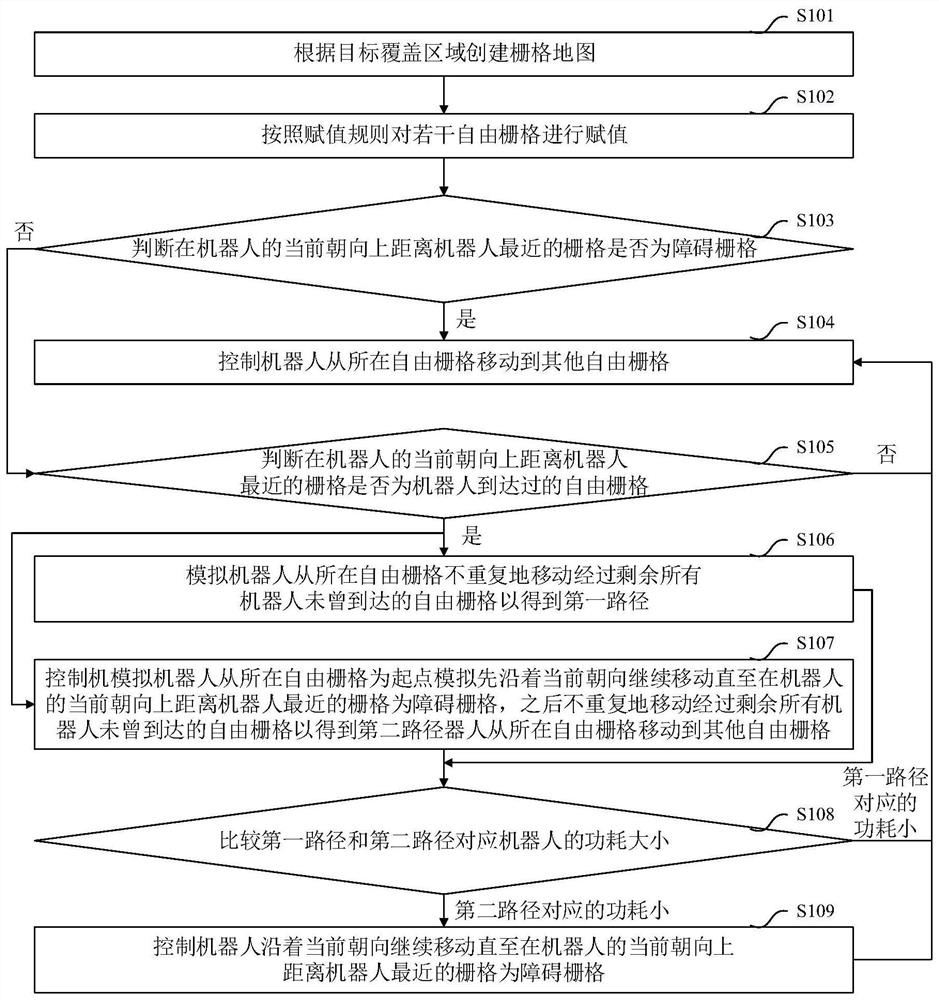
[0064] This embodiment provides a full-coverage path planning method for a robot, referring to figure 1 , the full-coverage path planning method of this embodiment includes:
[0065] S101. Create a grid map according to the target coverage area.
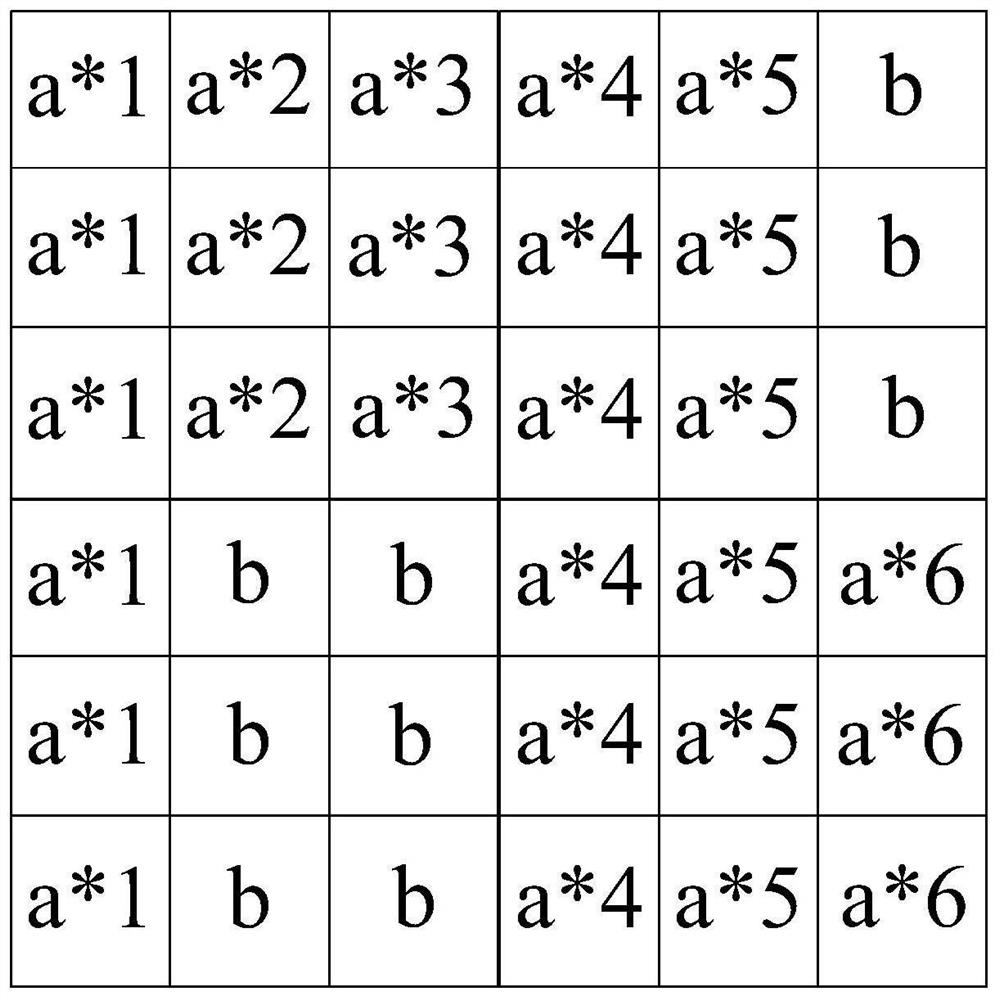
[0066] In this embodiment, the robot can first obtain the environmental information of the area where it is located through, but not limited to, laser radar, depth camera, binocular camera, etc., and then select the target coverage area as the full-coverage path planning object in the area where the robot is located. area, and create a grid map according to the target coverage area, wherein the grid map includes several grids, and each grid is marked as a free grid or an obstacle grid according to whether the robot can reach it. Specifically, the grid that the robot can reach can be marked as a free grid, and the grid that the robot cannot reach can be marked as an obstacle grid, where the obstacle grid can include, for example, an ...
Embodiment 2
[0092] This embodiment provides a full-coverage path planning system for a robot, referring to Figure 7 , the full-coverage path planning system of this embodiment includes:
[0093] The creation module 201 is used for creating a grid map according to the target coverage area.
[0094]In this embodiment, the robot can first obtain the environmental information of the area where it is located through, but not limited to, laser radar, depth camera, binocular camera, etc., and then select the target coverage area as the full-coverage path planning object in the area where the robot is located. area, and create a grid map according to the target coverage area, wherein the grid map includes several grids, and each grid is marked as a free grid or an obstacle grid according to whether the robot can reach it. Specifically, the grid that the robot can reach can be marked as a free grid, and the grid that the robot cannot reach can be marked as an obstacle grid, where the obstacle gr...
Embodiment 3
[0117] This embodiment provides an electronic device, which can be expressed in the form of a computing device (for example, it can be a server device), including a memory, a processor, and a computer program stored on the memory and operable on the processor, wherein the processor The full-coverage path planning method for the robot provided in Embodiment 1 can be realized when the computer program is executed.
[0118] Figure 8 A schematic diagram of the hardware structure of this embodiment is shown, as Figure 8 As shown, the electronic device 9 specifically includes:
[0119] At least one processor 91, at least one memory 92, and a bus 93 for connecting different system components, including the processor 91 and memory 92, wherein:
[0120] The bus 93 includes a data bus, an address bus, and a control bus.
[0121] The memory 92 includes a volatile memory, such as a random access memory (RAM) 921 and / or a cache memory 922 , and may further include a read only memory (...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com