


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Vehicle-road cooperation test method and device based on unmanned vehicle
A vehicle-road coordination and driverless technology, applied in the field of artificial intelligence, can solve problems such as high construction costs and test coverage, difficulty in testing driverless vehicle-road coordination technology, and economic losses.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment 1
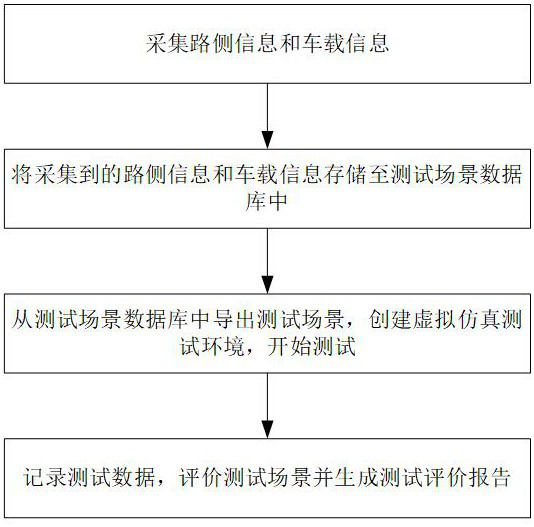
[0036] Embodiment one, refer to Figure 1 to Figure 4 To illustrate this embodiment, a vehicle-road collaborative testing method based on an unmanned car in this embodiment includes the following steps:
[0037] S1 collects roadside information and vehicle information;
[0038] Specifically, the roadside information includes traffic participants; the vehicle-mounted information includes the environment information around the vehicle, the location of the surrounding roads and obstacles, the speed direction angle and size, etc. taken from the vehicle's perspective, as well as the gear position of the vehicle's can bus, the steering wheel angle, four Axis acceleration, braking, vehicle speed, lamp status, accelerator pedal depth, mileage information and other information.
[0039] Specifically, traffic participants include various motor vehicles, non-motor vehicles, pedestrians, etc.;
[0040] S2 stores the collected roadside information and vehicle information into the test sc...
Embodiment 2
[0058] Embodiment two, refer to figure 2 Describe this embodiment, a vehicle-road collaborative test device based on an unmanned car in this embodiment, including an information collection module, an outdoor data transmission module, a test scene database module, a virtual simulation test environment module, a test data recording module and an analysis evaluation module;
[0059] The information collection module, the outdoor data transmission module, the test scene database module, the virtual simulation test environment module, the test data recording module and the analysis and evaluation module are sequentially connected;
[0060] The information collection module is used to collect roadside and vehicle information, and transmits the collected data to the test scene database module through the outdoor data transmission module;
[0061] The test scene database module is used to receive and store the data transmitted by the information collection module;
[0062] The virt...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com