Multi-UAV tracking mobile radiation source method based on position and velocity errors
A speed error, multi-UAV technology, applied in the field of communication, to achieve the effects of high positioning performance, precise tracking, and efficient tracking capabilities
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
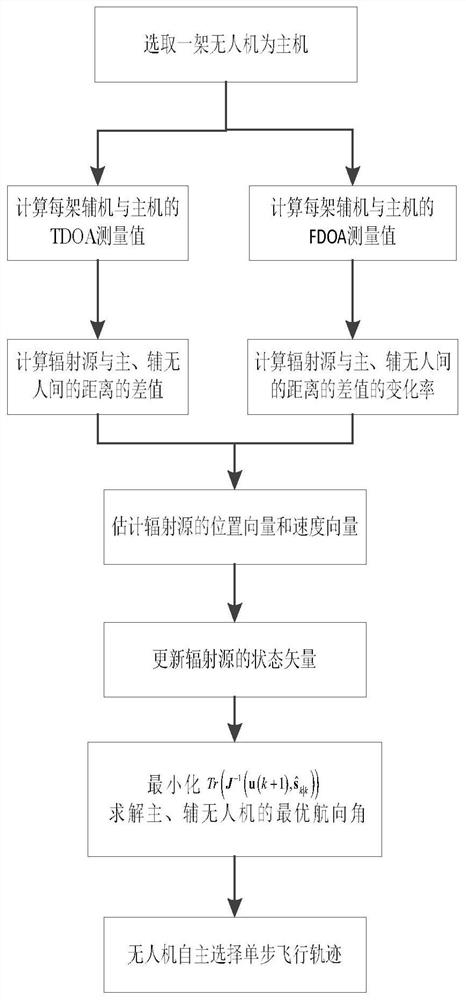
[0035] refer to figure 1 , to further describe the implementation steps of the present invention.
[0036] Step 1. Randomly select one UAV as the main machine, and the other UAVs as auxiliary machines.
[0037] Step 2, calculate the time difference of arrival TDOA measurement value of each auxiliary machine and the main machine:
[0038] Calculate the arrival time of the radiation source signal to the main and auxiliary drones.
[0039] The time of arrival of the calculated radiation source signal to each drone is obtained by the following formula:
[0040] ti = r i o / c
[0041] Among them, t i Indicates the time when the i-th UAV receives the radiation source signal, i represents the serial number of the UAV, i=1,2,...,M, M represents the total number of UAVs, r i o Indicates the actual distance between the i-th UAV and the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com