Offshore crane time optimal trajectory control method and system
A time-optimized and trajectory-controlled technology, which is applied to cranes, load-hanging components, transportation and packaging, etc., can solve the problem that the control method of land cranes cannot be directly used to control the offshore crane system, and does not consider the time limit of offshore cranes. Optimize transportation and other issues, achieve good load positioning and load swing elimination performance, good control effect, and improve efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
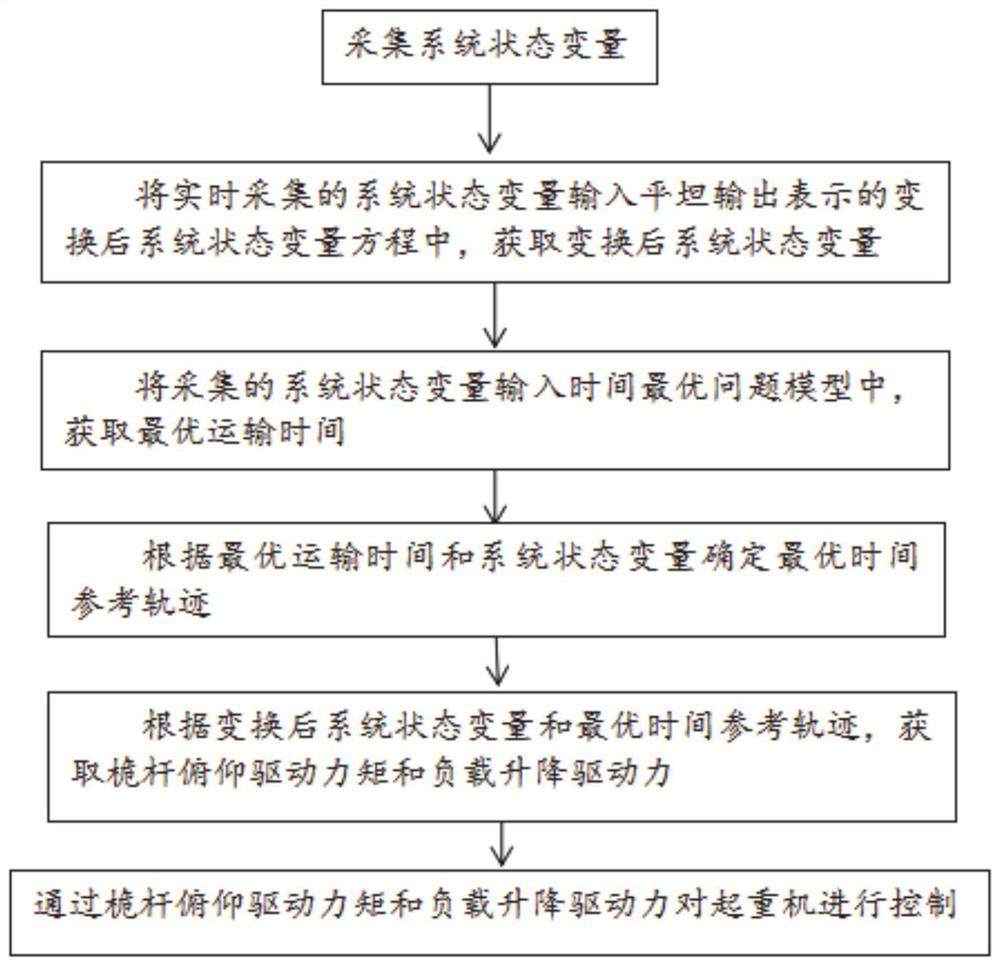
[0040] In this embodiment, a time-optimal trajectory control method for an offshore crane is disclosed, including:
[0041] Collect system state variables;
[0042] Input the collected system state variables into the transformed system state variable equation expressed by the flat output, and obtain the transformed system state variables;
[0043] Input the collected system state variables into the time optimal problem model to obtain the optimal transportation time. The time optimal problem model takes the shortest transportation time as the goal and constrains the system state variable to be less than or equal to the allowable value;
[0044] Determine the optimal time reference trajectory according to the optimal transportation time and system state variables;
[0045] According to the transformed system state variables and the optimal time reference trajectory, the mast pitching driving torque and load lifting driving force are obtained;
[0046] The crane is controlled ...
Embodiment 2
[0217] In this embodiment, a time-optimized trajectory control system for an offshore crane is disclosed, including:
[0218] The data acquisition module is used to collect system state variables;
[0219] The transformed system state variable acquisition module is used to input the collected system state variable into the transformed system state variable equation expressed by the flat output, and obtain the transformed system state variable;
[0220] The optimal transportation time acquisition module is used to input the collected system state variables into the time optimal problem model to obtain the optimal transportation time. value constraints;
[0221] An optimal time reference trajectory acquisition module, used to determine the optimal time reference trajectory according to the optimal transportation time and system state variables;
[0222] The driving force acquisition module is used to obtain the mast pitching driving moment and the load lifting driving force ac...
Embodiment 3
[0225] In this embodiment, an electronic device is disclosed, including a memory, a processor, and computer instructions stored in the memory and executed on the processor. When the computer instructions are executed by the processor, a method disclosed in Embodiment 1 is completed. The steps described in a time-optimal trajectory control method for an offshore crane.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com