Distance and course measurement method based on laser radar
A technology of laser radar and measurement method, applied in the field of environmental perception, which can solve the problems of sparse environmental texture features, dim light, and easy failure of positioning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0057]In order to make the above objects and features of the present invention more obvious and comprehensible, the specific implementation of the present invention will be described in detail below in conjunction with the accompanying drawings. Unless defined otherwise, technical and scientific terms used herein belong to the common understanding of those skilled in the art of the invention.
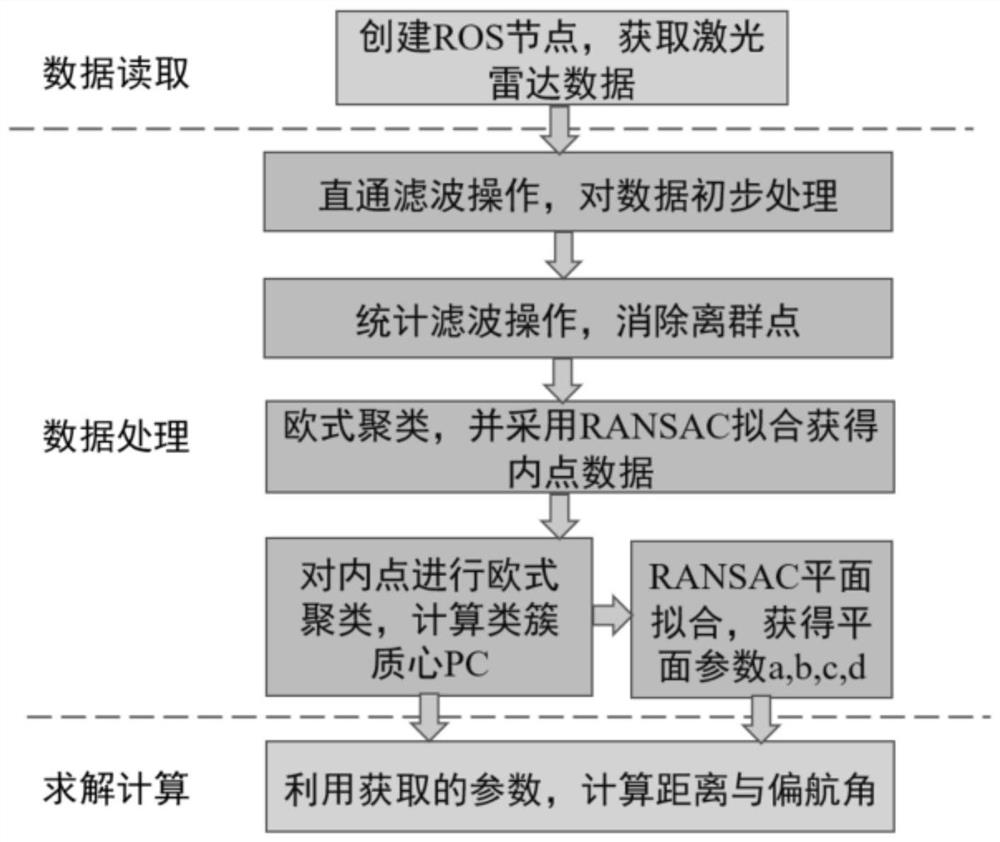
[0058] Such as figure 1 For the method flowchart of the present invention, the distance and heading measurement method based on laser radar includes the following specific processes:
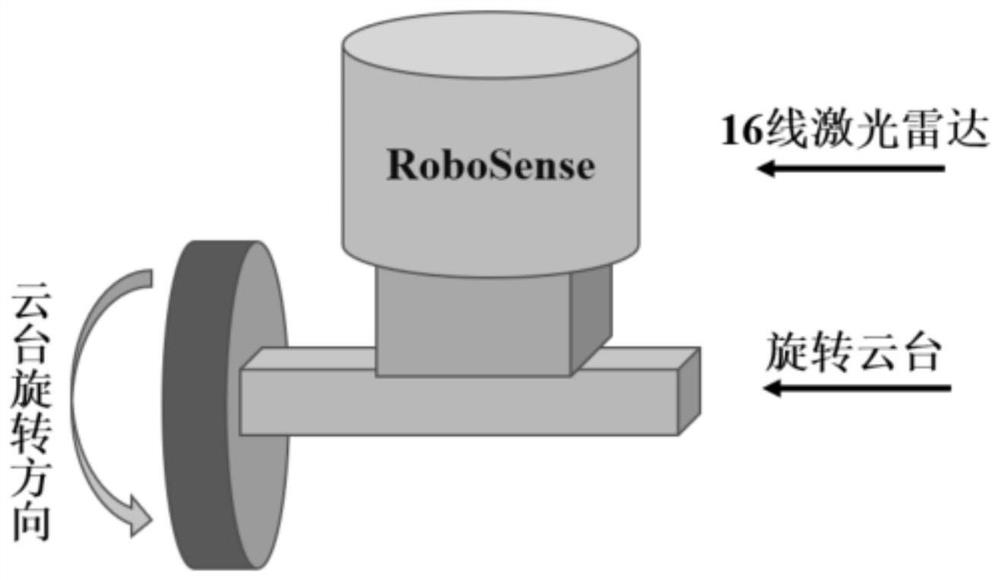
[0059] First, by controlling the rotation of the lidar pan / tilt, it is ensured that the lidar pan / tilt is in the same parallel plane as the robot body when scanning the environment. The lidar sensor model is as follows: figure 2 shown. The lidar uses RoboSense 16-line lidar, which measures 360 degrees horizontally and -15-15 degrees vertically. The laser radar and the industrial computer use Ethernet ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com