Blind spot turning planning method for unmanned vehicles based on partially observable Markov model
A Markov model and vehicle blind zone technology, applied in the field of turning planning in the blind zone of unmanned vehicles, can solve problems such as safety driving hazards of automatic vehicle control systems, and achieve the effects of improving traffic efficiency, speeding up processing speed, and good real-time performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0058] The technical solutions in the embodiments of the present invention will be clearly and completely described below with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are part of the embodiments of the present invention, but not all of the embodiments. Based on the embodiments of the present invention, all other embodiments obtained by those of ordinary skill in the art without creative work shall fall within the protection scope of the present invention.
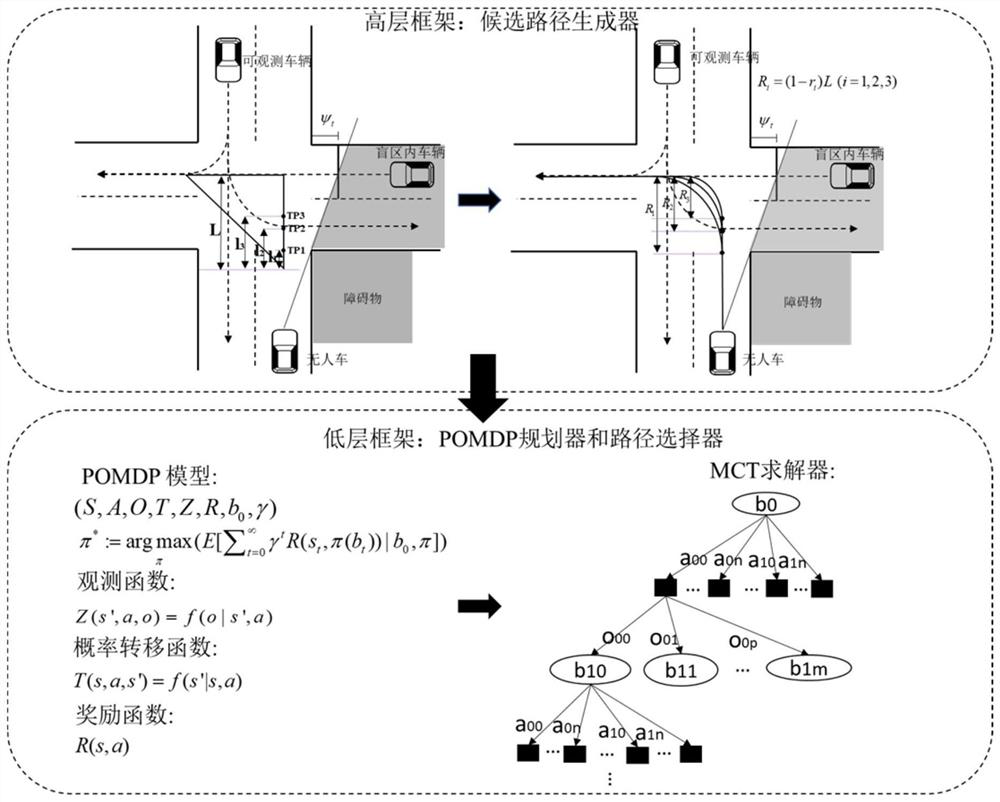
[0059] The present invention provides a layered algorithm for blind spot intersections of unmanned vehicles based on a partially observable Markov model. Planning and routing. The method can realize the safety and efficiency of unmanned vehicles turning at traffic intersections without signal lights, including:
[0060] Step 1: Obtain the traffic dataset of the current intersection;
[0061] Step 2: The high-level model of turn planning gener...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com