Reconfigurable near-end capturing method for autonomous docking process of unmanned vehicle
An unmanned vehicle, near-end technology, applied in the direction of motor vehicles, vehicle position/route/height control, non-electric variable control, etc., can solve the problems that cannot meet the needs of new intelligent vehicles, and achieve multi-functional and complex work Environment, the effect of improving docking efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The present invention will be described in detail below with reference to the accompanying drawings and examples.
[0026] This embodiment provides a proximal capture method for the autonomous docking process of the reconfigurable unmanned vehicle, which can solve the problem of difficulty in determining the docking timing during the docking process of the reconfigurable unmanned vehicle, and significantly improve the docking efficiency of the reconfigurable unmanned vehicle.
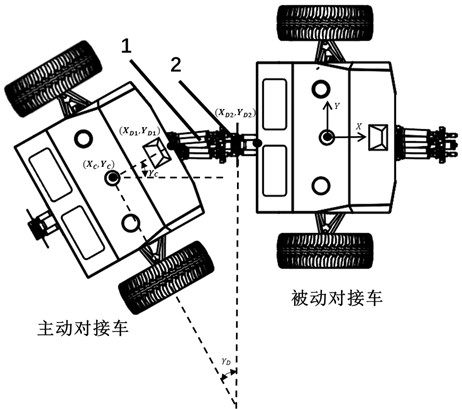
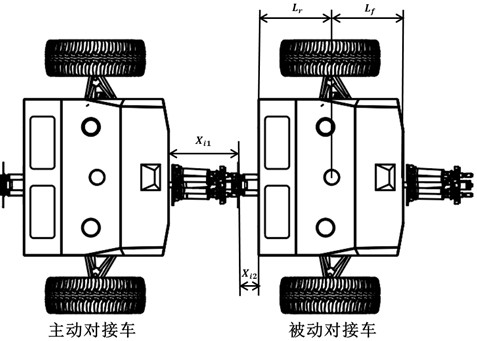
[0027] The reconfigurable unmanned vehicle has more than two unmanned vehicle units, and the two or more unmanned vehicle units are connected back and forth according to actual use requirements to realize the reconstruction of the unmanned vehicle. Each unmanned vehicle unit is provided with a docking mechanism for docking. The docking mechanism includes a movable end 1 and a fixed end 2, wherein the movable end 1 of the docking mechanism is set at the front end of the unmanned vehicle unit, and t...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap