Semi-physical simulation system and method for unmanned aerial vehicle attacking moving target dive flight
A half-in-the-loop simulation and moving target technology, which is applied in the field of half-in-the-loop simulation system for drones attacking moving targets and dive flight, can solve the problem of not having the ability to simulate the mutual operation state and position relationship between the drone and the target, and cannot be used for simulation Unmanned aerial vehicles attack the situation of the moving target during the dive flight phase, so as to achieve the effect of facilitating learning and analysis, and improving accuracy and credibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
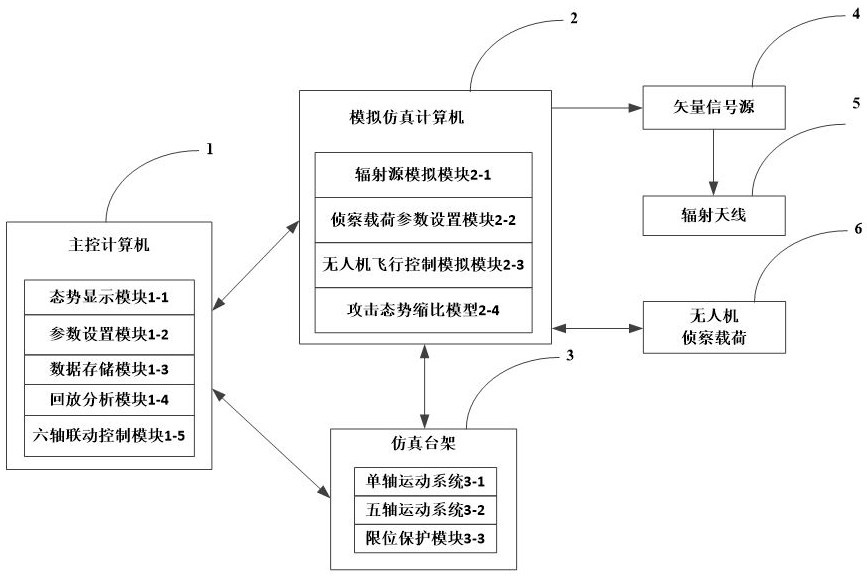
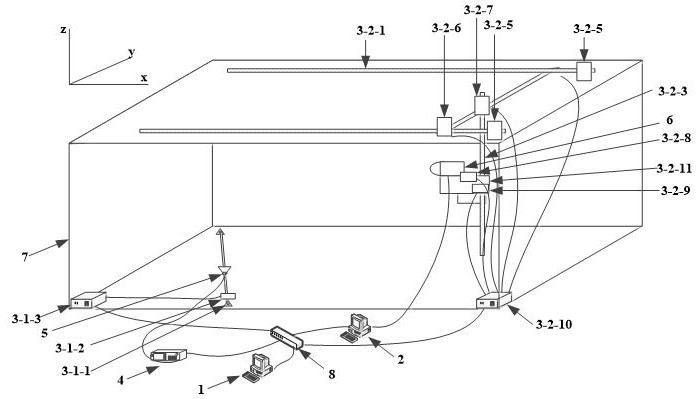
[0083] Such as figure 1 As shown, the present invention provides a kind of unmanned aerial vehicle attack moving target dive flight semi-physical simulation system, comprises main control computer 1, simulation simulation computer 2, simulation bench 3, vector signal source 4, radiation antenna 5 and unmanned aerial vehicle Scout payload 6;
[0084] The main control computer 1 is used as a human-computer interaction interface to provide rich functions of system operation, control and setting;
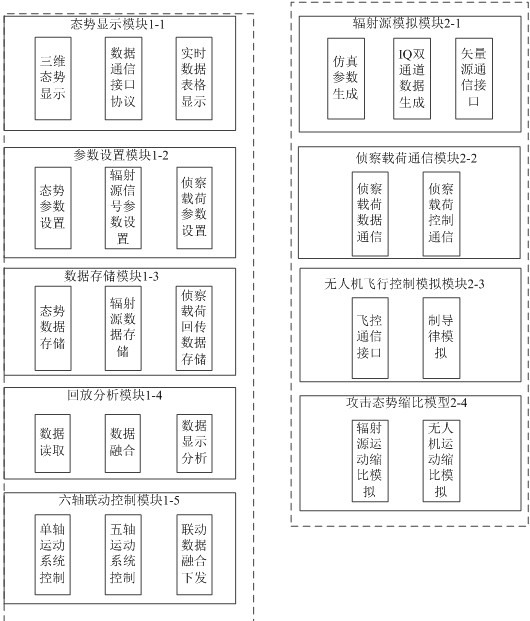
[0085] Specifically, the main control computer 1 includes a situation display module 1-1, a parameter setting module 1-2, a data storage module 1-3, a playback analysis module 1-4 and a six-axis linkage control module 1-5;
[0086] The situation display module 1-1 is used to display the situation information of the UAV dive attack in real time by collecting the positions of the UAV reconnaissance payload 6 and the radiation source, including the moving animation of the radiation source...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com