


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Bulldozer control method and device, equipment, storage medium and product
A control method and technology of bulldozers, applied in control/regulation systems, non-electric variable control, earth movers/shovels, etc., can solve the problem that bulldozers cannot automatically track the target path
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 example
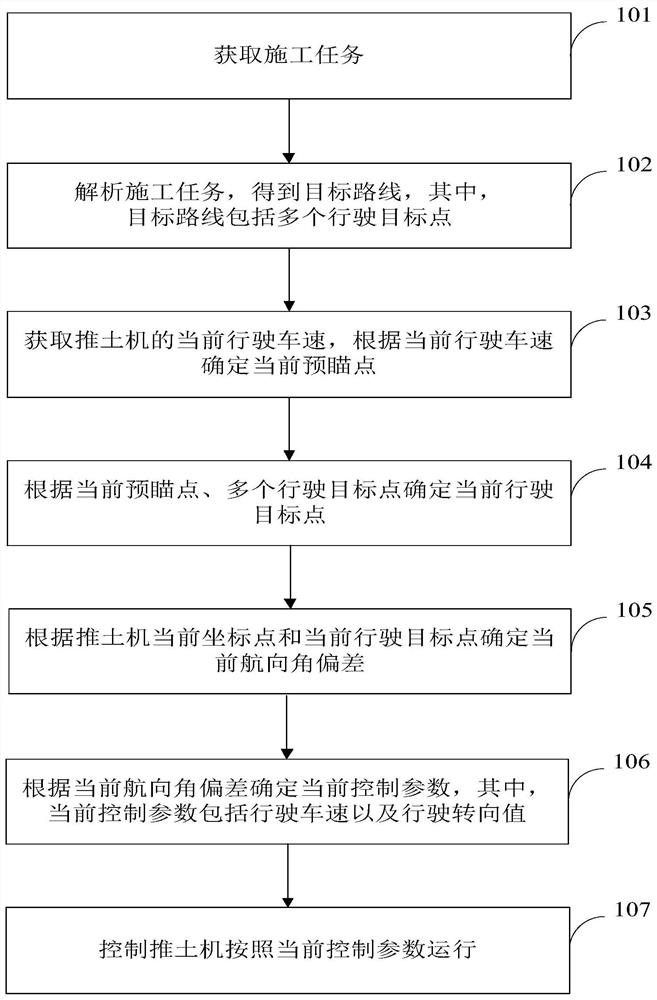
[0040] figure 2 is a schematic flow chart of the bulldozer control method provided by the first embodiment of the present invention, as shown in figure 2 As shown, the execution subject of the bulldozer control method provided in this embodiment is the bulldozer control device, and the bulldozer control device is located in the electronic equipment, then the bulldozer control method provided in this embodiment includes the following steps:
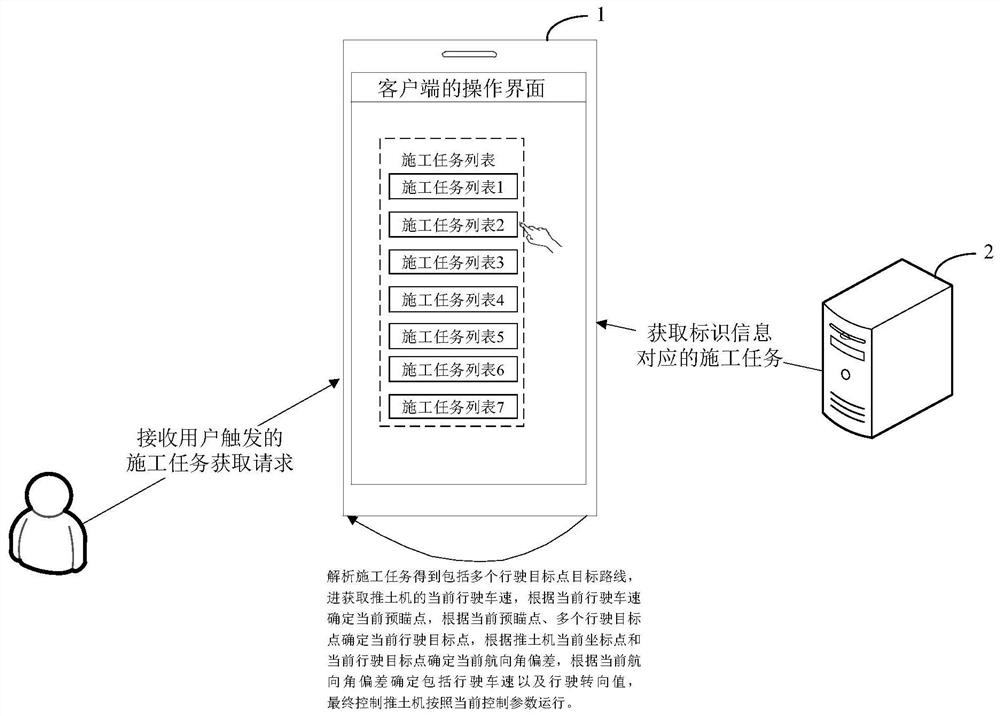
[0041] Step 101, obtaining construction tasks.
[0042] In this implementation, the construction task includes the task of the working path and the task of the walking path. The task of the working task refers to the corresponding path task when the bulldozer unloads, bulldozes, and transports the soil. The task of the walking path refers to the The corresponding path task when not working.
[0043]Among them, the construction task can be automatically obtained from the cloud platform, or the construction task sent by the cloud platfor...
no. 2 example
[0064] Optionally, on the basis of the bulldozer control method provided in the first embodiment of the present invention, step 103 is further refined, and step 103 includes the following steps:
[0065] Step 1031, compare the current driving speed with the preset speed, wherein the preset speed includes a first preset speed and a second preset speed.
[0066] In this embodiment, the current target point can be determined according to the current preview point, and the target point is related to the speed of the bulldozer. When the speed of the vehicle is too fast, the selected target point should be far away from the bulldozer, and more time can be reserved for adjustment , which is conducive to smooth steering of the vehicle. When the speed of the vehicle is too slow, the selected target point should be closer to the bulldozer, which is beneficial for the vehicle to quickly adjust the current forward direction and keep it consistent with the path direction. Therefore, when s...
no. 3 example
[0090] Optionally, on the basis of the bulldozer control method provided in the first embodiment of the present invention, step 104 is further refined, then step 104 includes the following steps:
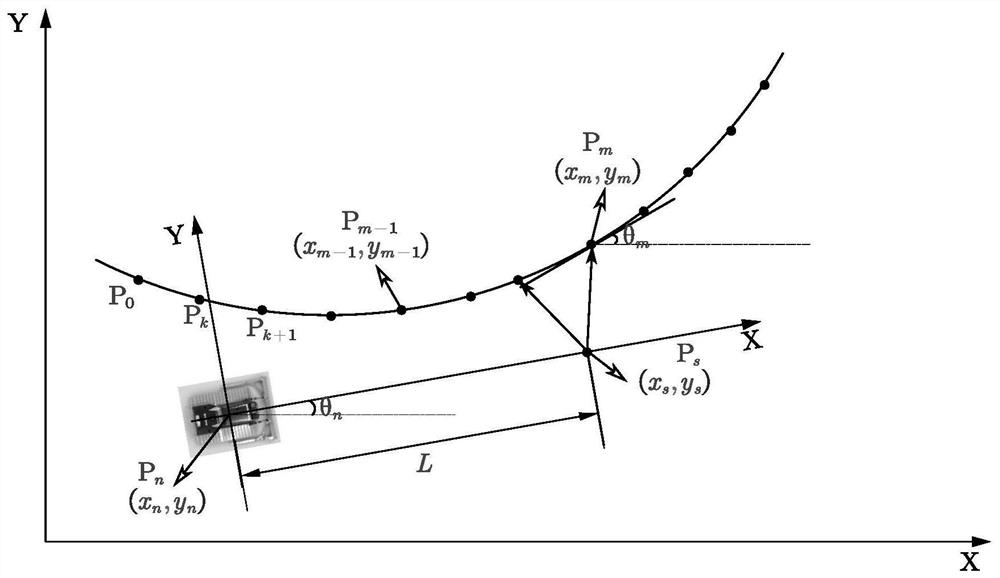
[0091] Step 1041, calculate the distance between the preview point and each driving target point, and select the driving target point with the smallest distance as the current driving target point.
[0092] In this embodiment, the target route includes multiple driving target points, such as image 3 As shown, the driving target point is P 0 , P k , P k+1 , P m etc. by P 0 , P k , P k+ 1, P m Constitute the target route, the preview point is Ps(x s ,y s ) After determining the preview point, calculate the distance between the preview point and each driving target point in front of the vehicle's driving direction, and select the driving target point with a short distance as the current driving target point, wherein, after calculating P m with P s The minimum distance is th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com