Multi-field point cloud registration method for blades based on overlapping features and local distance constraints
A technology of distance constraint and point cloud registration, which is applied in image analysis, image enhancement, instrumentation, etc., can solve the problems of poor reliability, uneven density, mechanical error and other problems of blades, and achieve the avoidance of misregistration, good adaptability and robustness. Rodness, the effect of reducing computational complexity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0045] A blade multi-field point cloud registration method based on overlapping features and local distance constraints provided in this embodiment includes the following steps:
[0046] Step 100: Obtain the point cloud data set of the multi-field blade of the blade. In this embodiment, a four-axis measurement device and a line laser sensor are used to collect the point cloud data set of the blade. The four-axis measurement device rotates or translates the points obtained by the multi-field blade The cloud data set, using a four-axis measurement device and a line laser sensor to obtain the point cloud data set of the blade is a common technical means in the field, so this embodiment will not repeat it.
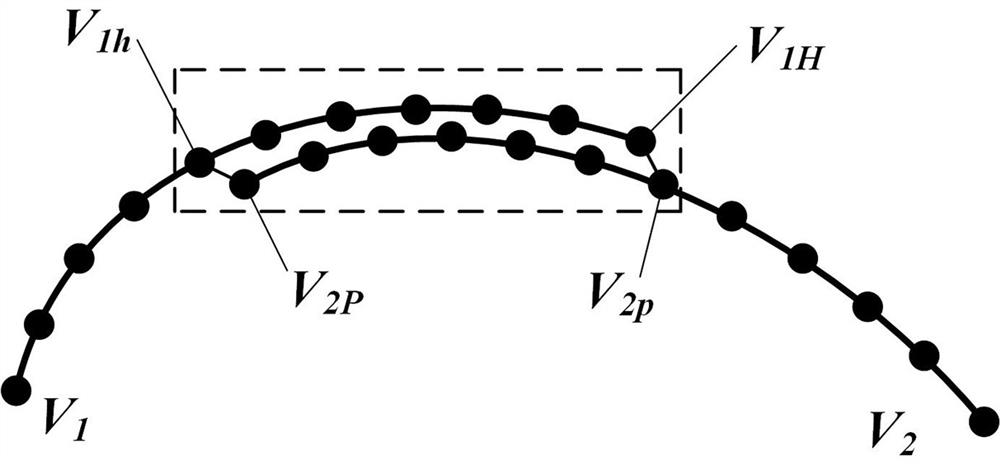
[0047] Extract the data sets of the overlapping area of the point cloud data sets of two adjacent blades in the field of view. The extraction principle is as follows: figure 2 As shown, the specific implementation steps are as follows:
[0048] Step 101: Let the point clou...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com