A UAV path planning method based on second-order cone optimization
A path planning, unmanned aerial vehicle technology, applied in mechanical equipment, combustion engines, internal combustion piston engines, etc., can solve problems such as high energy consumption, limited application scope, inability to guarantee convergence and optimality, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
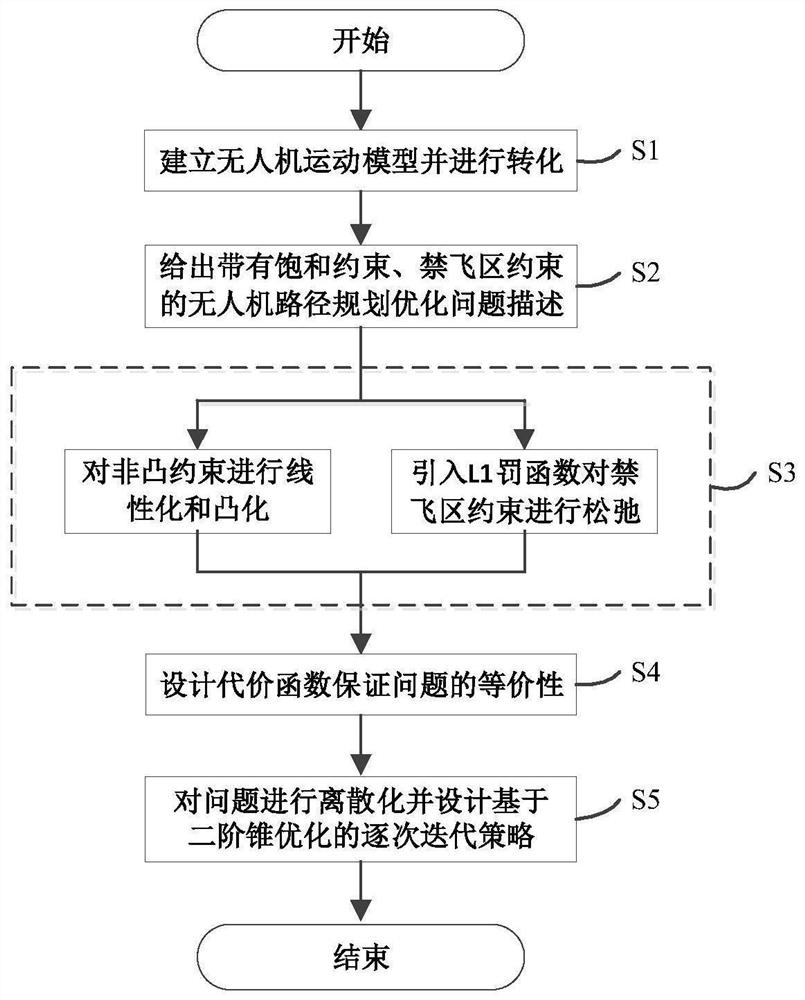
[0071] The first step: use the method of variable substitution to process the two-dimensional UAV motion model, and introduce new control quantities, new state quantities, and equality constraints composed of new control quantities and new state quantities.
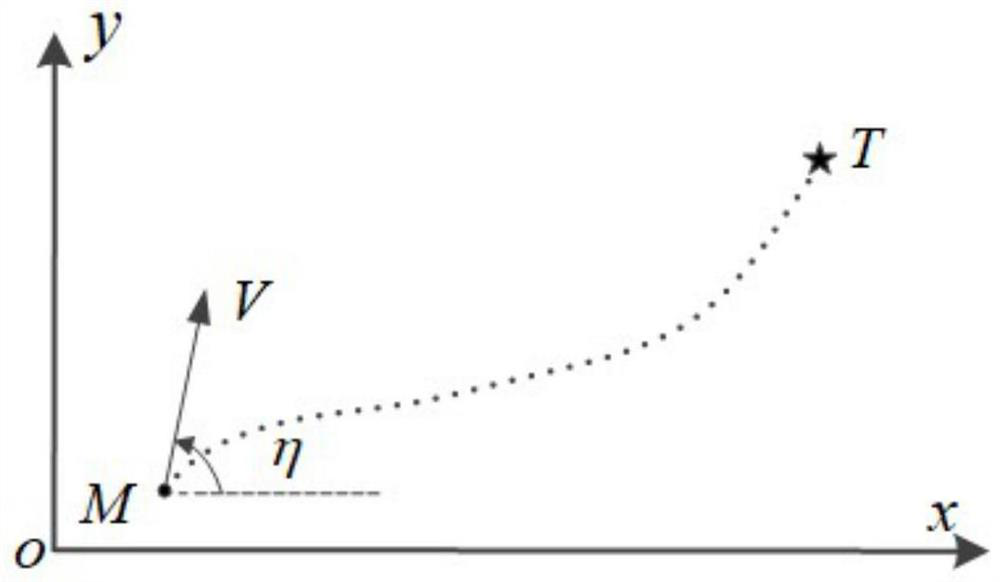
[0072] like figure 2 As shown, point M and point T respectively represent the initial position and target position of the UAV, and the dotted line between point M and point T is the flight path, then the two-dimensional UAV motion model is:
[0073]
[0074] Among them, x represents the horizontal coordinate of the drone, y represents the vertical coordinate of the drone, η represents the heading angle of the drone, V represents the flight speed of the drone, u represents the control input, and the direction of u is the same as that of the drone. The velocity direction is vertical;
[0075] In order to transform the two-dimensional UAV motion model into the second-order cone optimization framework, the method of vari...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com