A method for dragging and guiding positioning of a manipulator based on joint torque
A joint torque, guidance and positioning technology, applied in surgical manipulators, surgical robots, computer-aided surgery, etc., can solve the problems of convenience, small safety risks, and low cooperation between robotic arms and doctors, and reduce production. Cost, high security, direct and clear effect of control instructions
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0015] In order to clarify the technical details of the present invention, the content of the present invention will be further described in detail below with reference to the accompanying drawings and examples.
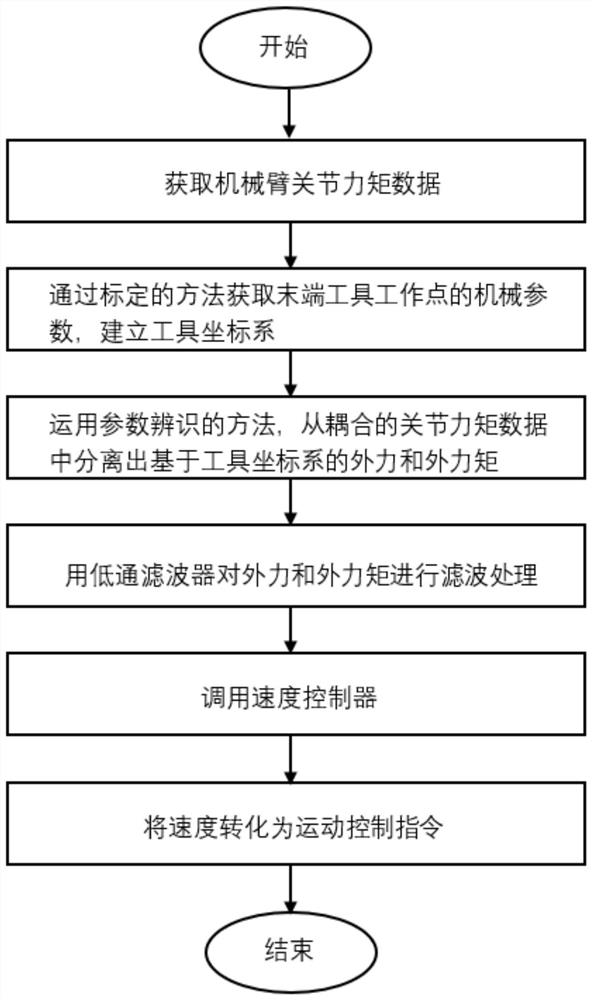
[0016] like figure 1 As shown, the method for dragging, guiding and positioning a mechanical arm based on joint torque provided by the present invention includes the following steps:
[0017] S1. Acquisition of joint torque data of the robotic arm;
[0018] In order to make the expression more precise, it is hereby stated that the joint torque mentioned below refers to the transmission torque, that is, the vector sum of all the moments generated between the connecting rod and the connecting rod. According to the different types of manipulators, the acquisition methods of joint torque can be divided into three types: motor current estimation, joint torsion amplitude estimation and strain gage measurement. The motor current estimation uses the proportional relationsh...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com