Numerical control machine tool spindle axial thermal error physical modeling method
A modeling method and technology of CNC machine tools, applied in the directions of simulator, program control, computer control, etc., can solve the problems of increased compensation cost, multiple sensors, and multiple hyperparameters, etc., to achieve convenient post-compensation, strong generalization ability, and step-by-step simple effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0044] A physical modeling method for axial thermal error of a numerically controlled machine tool spindle provided in this embodiment includes the following steps:
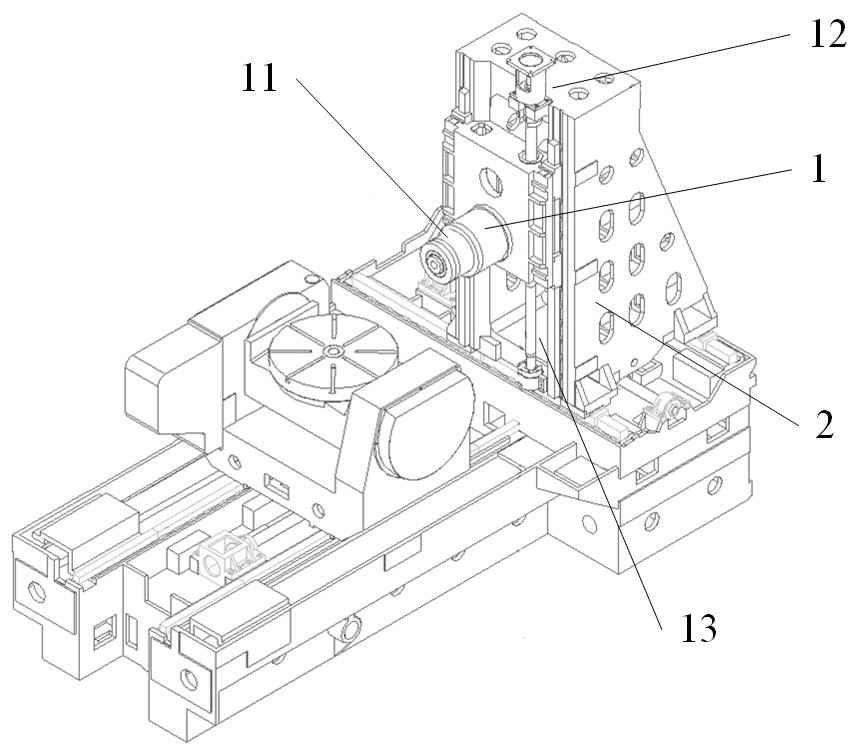
[0045] (A) Install a temperature sensor on the machine tool, the temperature sensor includes 4, which are used to measure the temperature T of the spindle 1 S The first temperature sensor is used to measure the temperature T of the upper part of the column 2 C1 The second temperature sensor is used to measure the temperature T of the lower part of the column 2 C2 The third temperature sensor and used to measure the ambient temperature T amb The fourth temperature sensor, such as figure 1 As shown, the installation location 11 of the first temperature sensor, the installation location 12 of the second temperature sensor, the installation location 13 of the third temperature sensor, and the installation location of the fourth temperature sensor is installed on a fixture near the machine tool, such as on a wall o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com