Intelligent vehicle pile-surrounding autonomous following test evaluation method
An evaluation method, smart car technology, applied in the direction of navigation calculation tools, etc., can solve problems such as unable to test smart cars
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
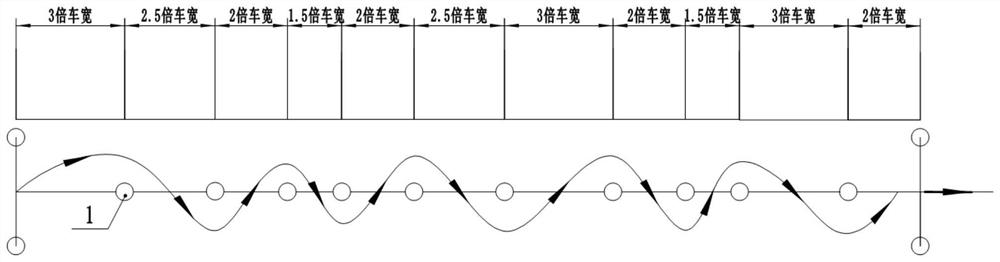
[0038] A kind of smart car of the present embodiment follows the test and evaluation method autonomously around the pile, comprising the following steps:
[0039] Such as figure 1 As shown in S1, determine the start point and end point, and arrange several test piles between the start point and end point. times, 2.5 times and 3 times the test pile spacing, the order of the test pile spacing is adjusted randomly; the maximum distance between the farthest two test piles among the three adjacent test piles should not be less than 0.5 times the vehicle length, and the maximum distance should be At least 2 meters longer than the length of the car. The maximum outer diameter of the test pile is not greater than 0.06m, and the height is greater than or equal to 1.5m.
[0040] The distance from the starting point to the first test pile is 3 times the width of the vehicle. The traffic width at the starting point is 3 times the width of the vehicle, and should be at least 2 meters wi...
Embodiment 2
[0074] The difference between this embodiment and Embodiment 1 is that in S503 of this embodiment, there are multiple cameras, and at least one camera is controlled to capture real-time images of the road surface after the vehicle under test travels, and at least one camera is also controlled to capture real-time images of the detected vehicle. Measure the image of vehicle running; In the present embodiment, camera is greater than 3.
[0075] It also includes S505. The server judges whether the running track of the tested vehicle is smooth, and if not, judges whether the running track of the tested vehicle is smooth based on the running image of the tested vehicle; if it is not smooth, no processing is performed; if it is smooth, skip to S506;
[0076] S506. Control at least one camera to capture the footprint image of the guide and the walking image of the guide, and judge whether the guide walks smoothly based on the walking image of the guide. If it is smooth, then judge whe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com