A multi-relay UAV track planning method, system and storage medium in uncertain channel environment
A technology for track planning and channel environment, applied in the field of unmanned aerial vehicles, which can solve the problems of difficulty in researching the communication network of unmanned aerial vehicles, inability to obtain accurate channel state information, etc., and achieve the effect of high reliability and improved energy efficiency.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
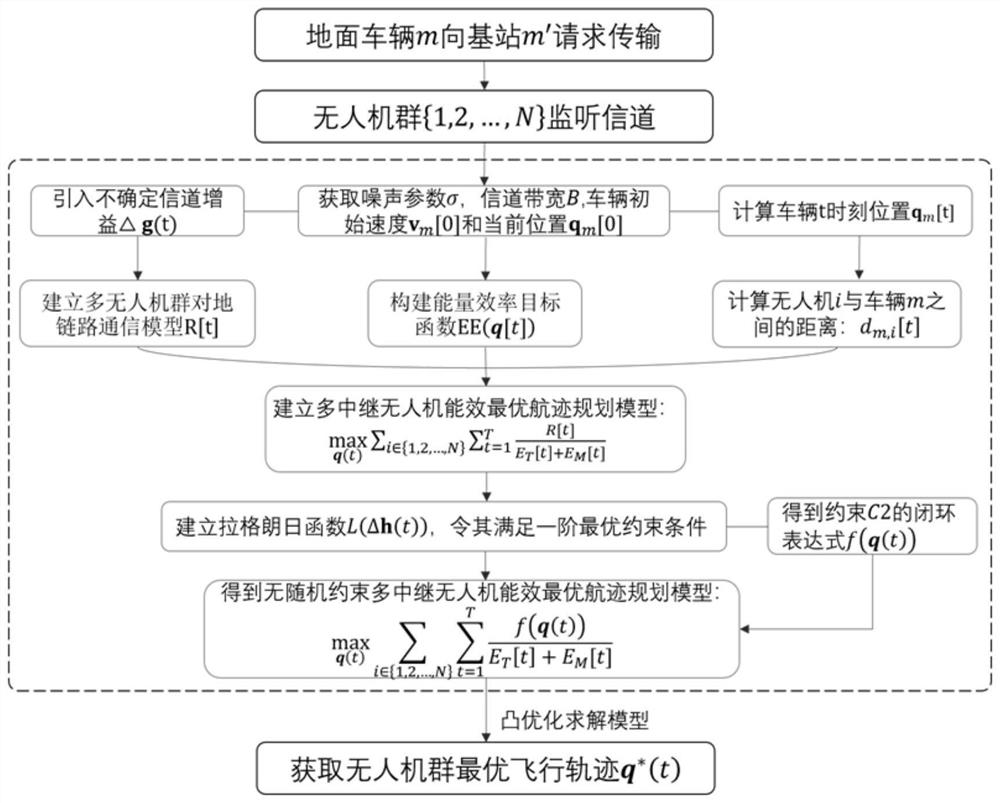
[0064] figure 1 This is the flow chart of the multi-relay UAV track planning method in the uncertain channel environment of the present invention. like figure 1 As shown, the present invention provides a multi-relay UAV track planning method in an uncertain channel environment, and the method includes the following steps:
[0065] S1: Establish a multi-UAV swarm-to-ground link communication model, and express the downlink transmission rate of the UAV swarm as:
[0066]
[0067] where N is the number of drones, p i [t] is the transmission power of the i-th UAV at time t, g[t] is the channel gain at time t; T is the communication and flight time between the UAV group and ground vehicles; B is the bandwidth parameter; σ is white Gaussian noise parameter; d s,i [t] is the distance between the ith UAV of the relay UAV group and the ground mobile vehicle m;
[0068] In this step, the multi-UAV swarm-to-ground link communication model is described by the UAV transmission powe...
Embodiment 2
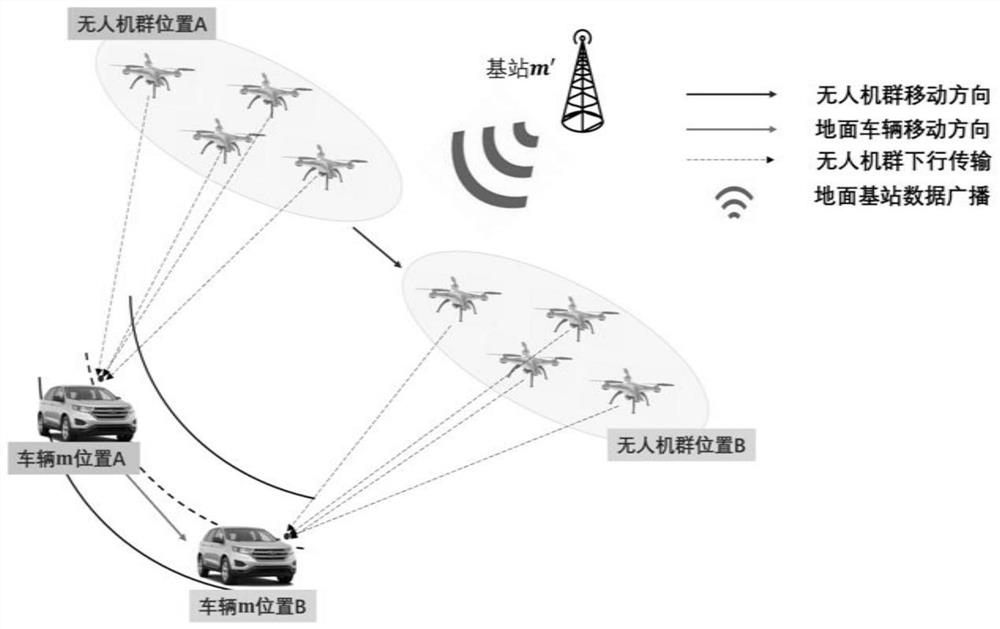
[0118] like figure 2 As shown, the present invention also provides a multi-relay UAV track planning system in an uncertain channel environment, the system includes a group of relay UAVs, a ground mobile vehicle and a base station, and the ground mobile vehicle passes through the The relay drone swarm communicates with the base station, and the system implements the multi-relay drone track planning method in the uncertain channel environment in Embodiment 1 through the relay drone swarm and the ground mobile vehicle.
[0119] in, figure 2 The medium ground mobile vehicle m transmits a download request to the base station m' and enters the wireless network coverage of the drone swarm. The drone swarm establishes a connection with the ground mobile vehicle, and according to the figure 1 The method in calculates the flight trajectories of UAV swarms.
[0120] Preferably, when the ground mobile vehicle requests transmission from the base station, the UAV swarm is triggered to ...
Embodiment 3
[0122] According to another aspect of the present invention, the present invention further provides a computer-readable storage medium, wherein the computer-readable storage medium stores computer-executable instructions, and when the computer-executable instructions are executed by a processor The method for planning the trajectory of a multi-relay UAV in an uncertain channel environment in Embodiment 1 is implemented.
[0123] Among them, the storage medium includes a floppy disk, a hard disk, CD-ROM, MO, DVD, DVD-ROM, DVD-RAM, BD (Blu-ray (registered trademark) Disc), semiconductor memory, and the like. In addition, as one aspect of the present invention, a computer system may be provided including a microprocessor and a memory, the memory recording the above-mentioned computer program, and the microprocessor operating according to the computer program. In addition, the above-mentioned program may be transferred via a network and implemented by another independent computer ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com