Multi-mode 3D target detection method and system thereof, terminal and medium
A target detection, multi-modal technology, applied in the field of 3D target detection, can solve problems such as inapplicability, no description or report found, inaccurate prediction of object edge depth, etc., to achieve high-quality detection and high-performance improvement.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0056] The following is a detailed description of the embodiments of the present invention: this embodiment is implemented on the premise of the technical solution of the present invention, and provides detailed implementation methods and specific operation processes. It should be noted that those skilled in the art can make several modifications and improvements without departing from the concept of the present invention, and these all belong to the protection scope of the present invention.
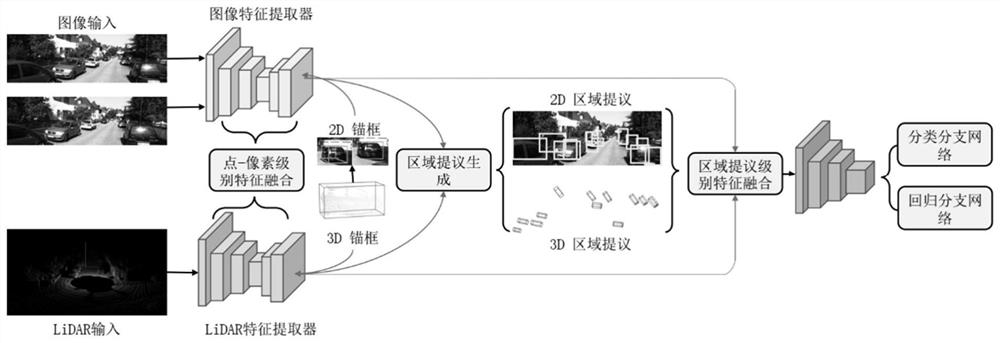
[0057] figure 1 It is a flowchart of a multimodal 3D object detection method provided by an embodiment of the present invention.
[0058] The multi-modal 3D object detection method provided by this embodiment first uses the image and the original point cloud as input, respectively inputs the independent feature extractor to extract the corresponding features, and then performs the point-pixel level feature fusion in the first stage to generate high-quality 3D region proposal. Then the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com