A Robotic Agricultural Picking Device Based on Machine Vision Detection
A machine vision detection and robot technology, which is applied in agriculture, picking machines, agricultural machinery and implements, etc., can solve the problems of easy impact and broken fruit, easy omission in manual observation, and low intelligence in semi-manual picking. Instability, increased safety and stability, reduced labor effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention.
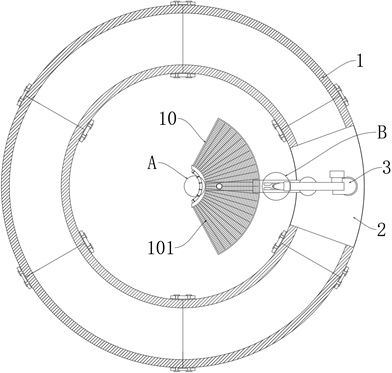
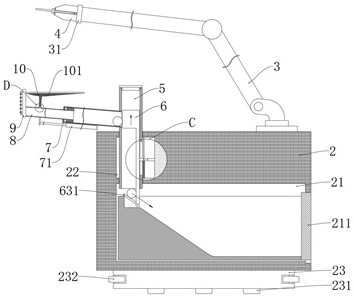
[0035] refer to Figure 1-10 , a robot agricultural picking device based on machine vision detection, comprising an assembled track groove 1, an organism 2 is installed on the assembled track groove 1, a collection tube 5 is inserted on the upper surface of the body 2, and a collection tube 5 is inserted on the side wall of the collection tube 5 Fixed tube 7, the end of the fixed tube 7 away from the collection tube 5 is slidingly inserted with a telescopic tube 8, the end of the telescopic tube 8 away from the fixed tube 7 is equipped with an arc-shaped support plate 9, and the upper surface of the body 2 is equipped with a multi-axis mechanical arm 3 , the upper en...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com