A multi-agent cooperative target search method based on particle swarm optimization
A particle swarm algorithm and target search technology, which is applied in the field of swarm intelligence and multi-agent target search, can solve problems such as failure of moving time tasks, and achieve the effect of reducing moving distance and search time, realizing performance, and reasonable design.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment
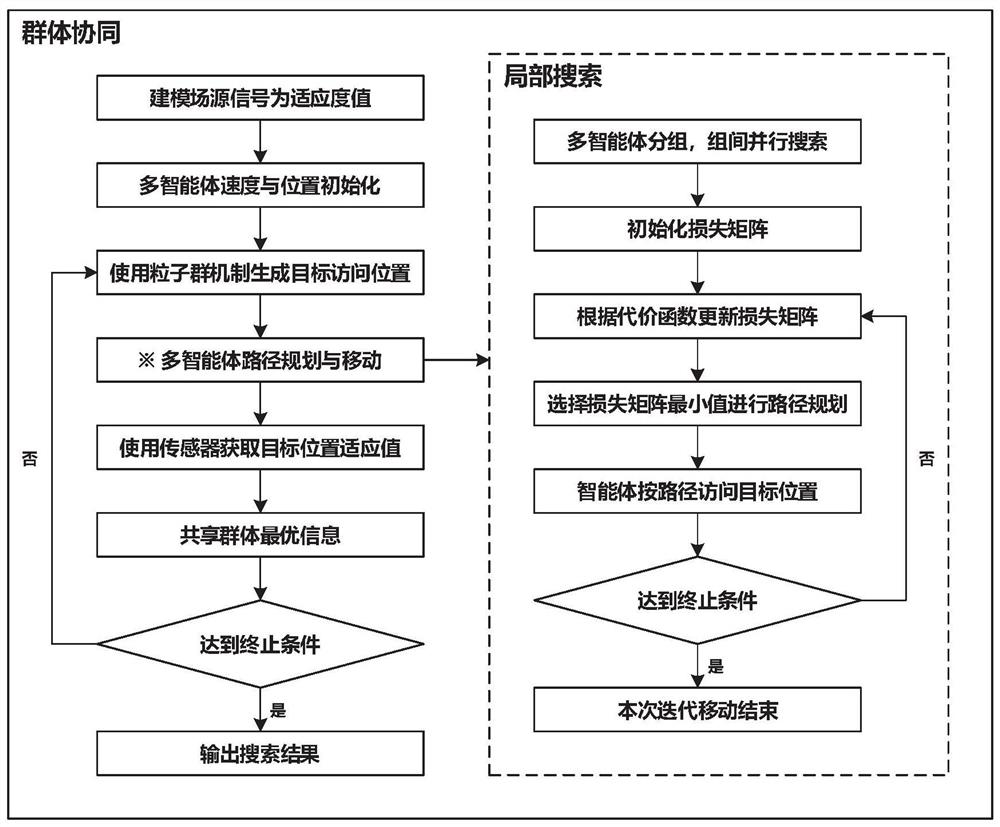
[0040] as Figure 1 As shown in the present embodiment, the pluralistic agent collaborative target search method, specifically comprising the following steps:
[0041] Step 1.1: In the application scenario, the multi-agent is distributed, the multi-agent is treated as a particle swarm, the individual agents are treated as particles, the environment is modeled, and the field source signal value detected by the agent sensor is used as the fitness index of the particle swarm algorithm.
[0042] Step 1.2: Initialize the particle swarm algorithm parameter settings: particle swarm size n=50, optimization dimension D=2, maximum number of iterations G=10000.
[0043] Step 1.3: Randomly initialize the initial position of n particles x= {x 1 ,x 2 ,...,x n } and speed v={v 1 ,v 2 ,...,v n }, initialize the position of m agents S={S 1 ,S 2 ,...,S m } and speed V=1.
[0044] Step 1.4: Multi-agents perform optimal path planning through a local search strategy to traverse all current particle pos...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com