Three-steering-wheel control algorithm
A control algorithm and steering wheel technology, applied in non-electric variable control, control/regulation systems, two-dimensional position/channel control, etc., can solve problems such as rigid pulling and failure, and achieve the effect of solving problems caused by rigid pulling
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach
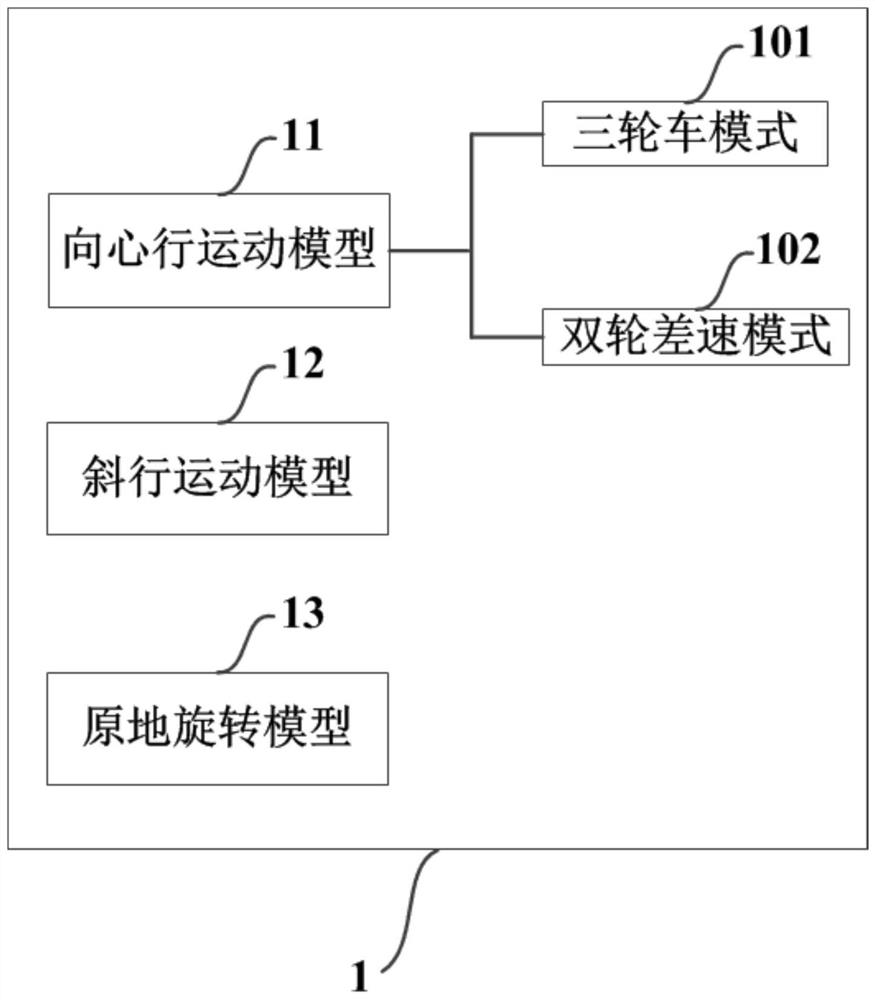
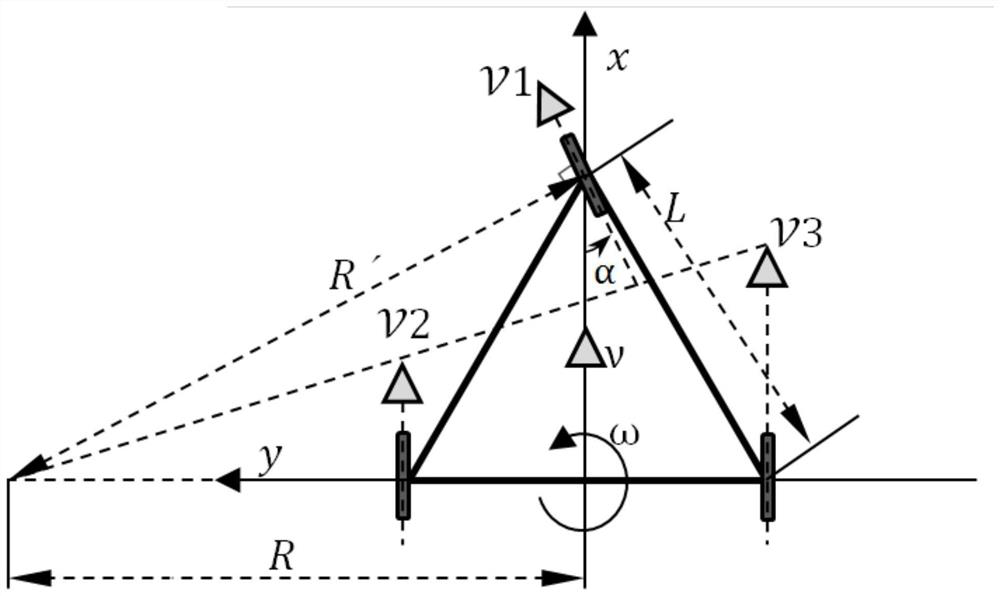
[0081] As an embodiment of the present invention, refer to figure 2 , the tricycle mode 101 includes Formula 101, Formula 102, Formula 103, Formula 104, Formula 105, Formula 106, and Formula 107, as follows:
[0082] Formula 101:
[0083] Formula 102:
[0084] Formula 103:
[0085] Formula 104:
[0086] Formula 104:
[0087] Formula 105:
[0088] Formula 106:
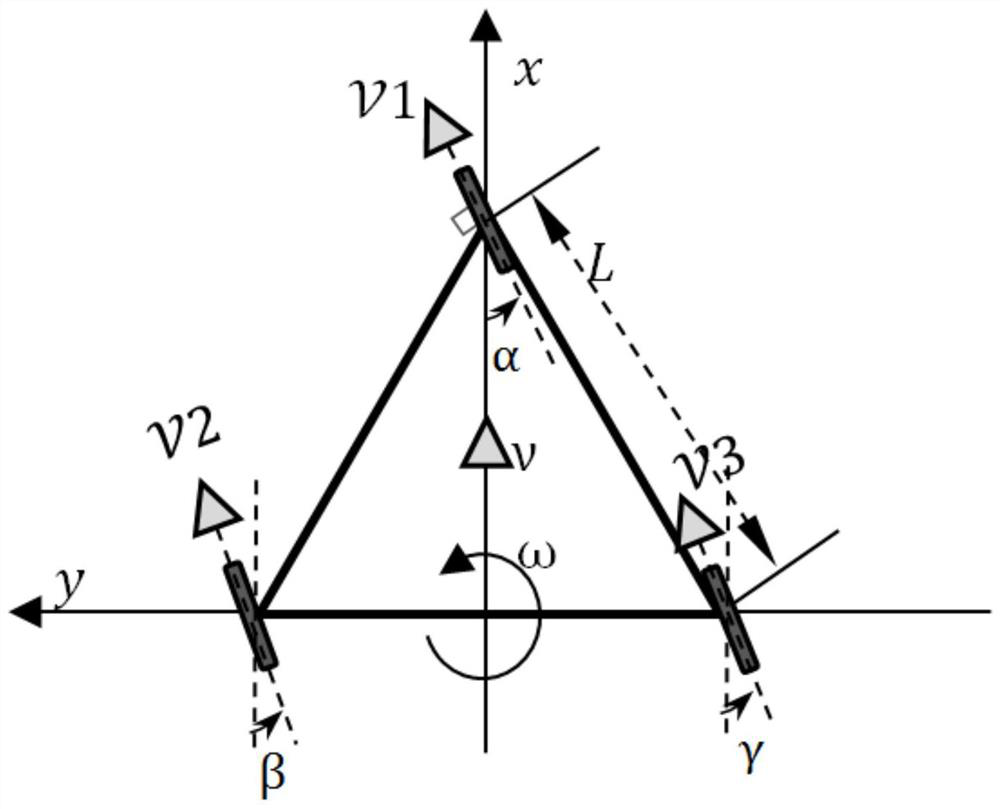
[0089] As an embodiment of the present invention, refer to figure 2 , the two-wheel differential mode 102 includes formula 111, formula 112, formula 113, formula 114 and formula 115, as follows:
[0090] Formula 111:
[0091] Formula 112:
[0092] Formula 113:
[0093] Formula 114:
[0094] Formula 115:
[0095] As an embodiment of the present invention, υ 2 and υ 3 is calculated as follows:
[0096] According to formula 106, formula 107, formula 111 and formula 115:
[0097] Formula 121:
[0098] Formula 122:
[0099] From Equation 121 and Equation 122:
[0100] Formula ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com