Two-degree-of-freedom differential type mechanical arm joint module
A joint module and differential technology, which is applied in the field of medical robots, can solve problems such as low precision, inability to detect angles, and easy damage to the shaft, and achieve high precision, easy processing, and guaranteed coaxiality and verticality.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] The present invention will be further described below in conjunction with the accompanying drawings.
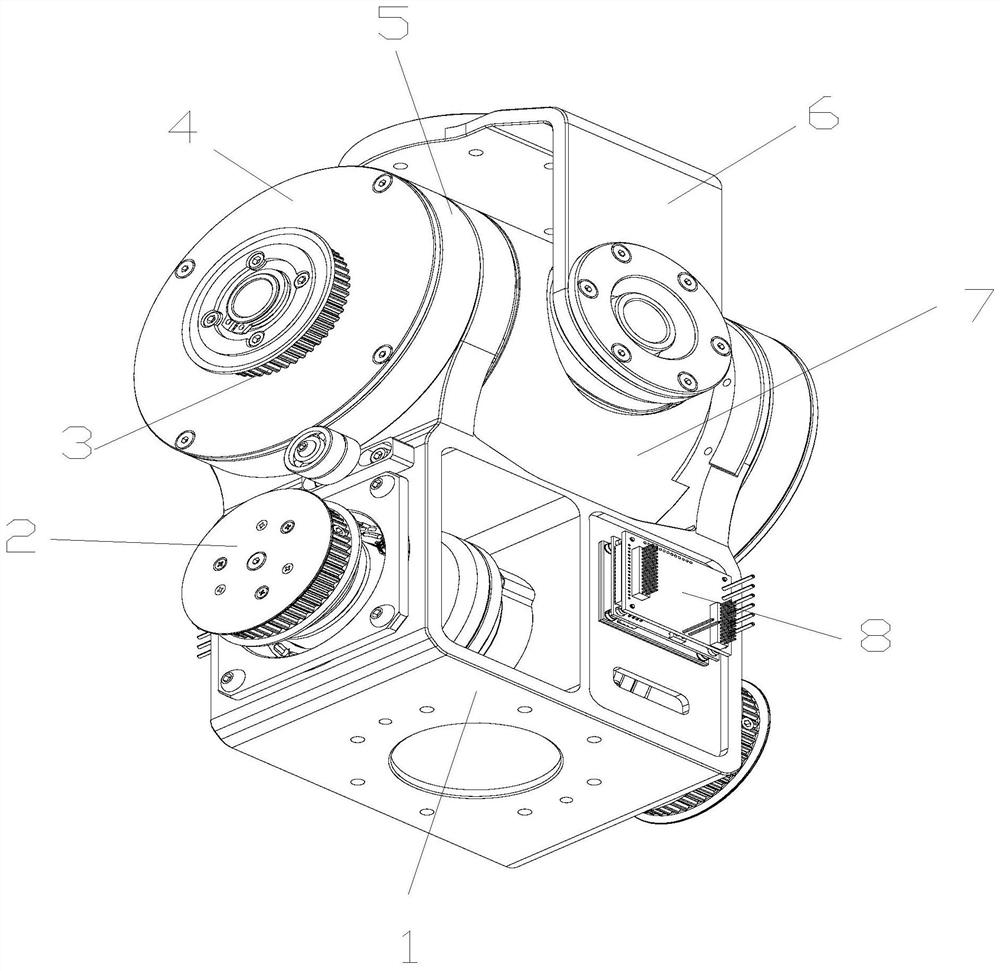
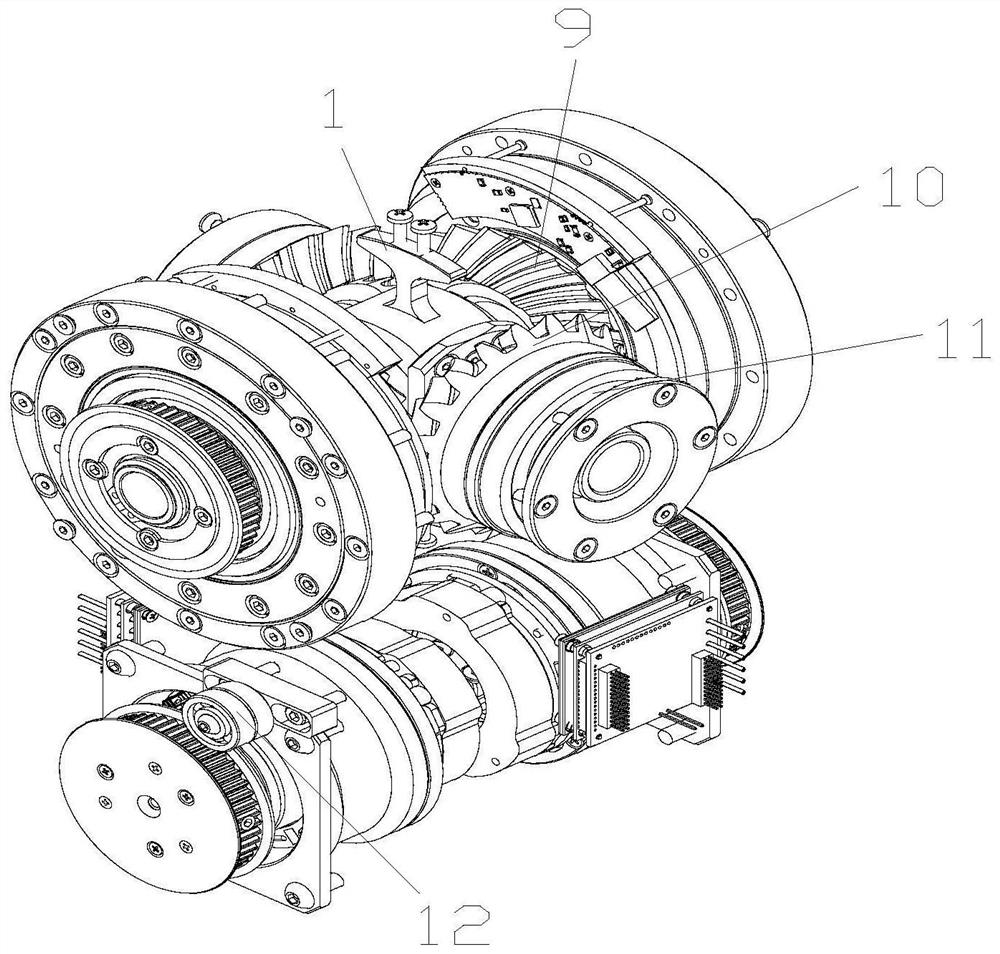
[0020] Such as figure 1 As shown, the two-degree-of-freedom differential manipulator joint module of the present invention mainly includes a bracket 1, a first power source, a second power source, two sets of belt transmission devices, two driving bevel gears 9, and two passive bevel gears 10 , cross shaft and output connecting rod 6.
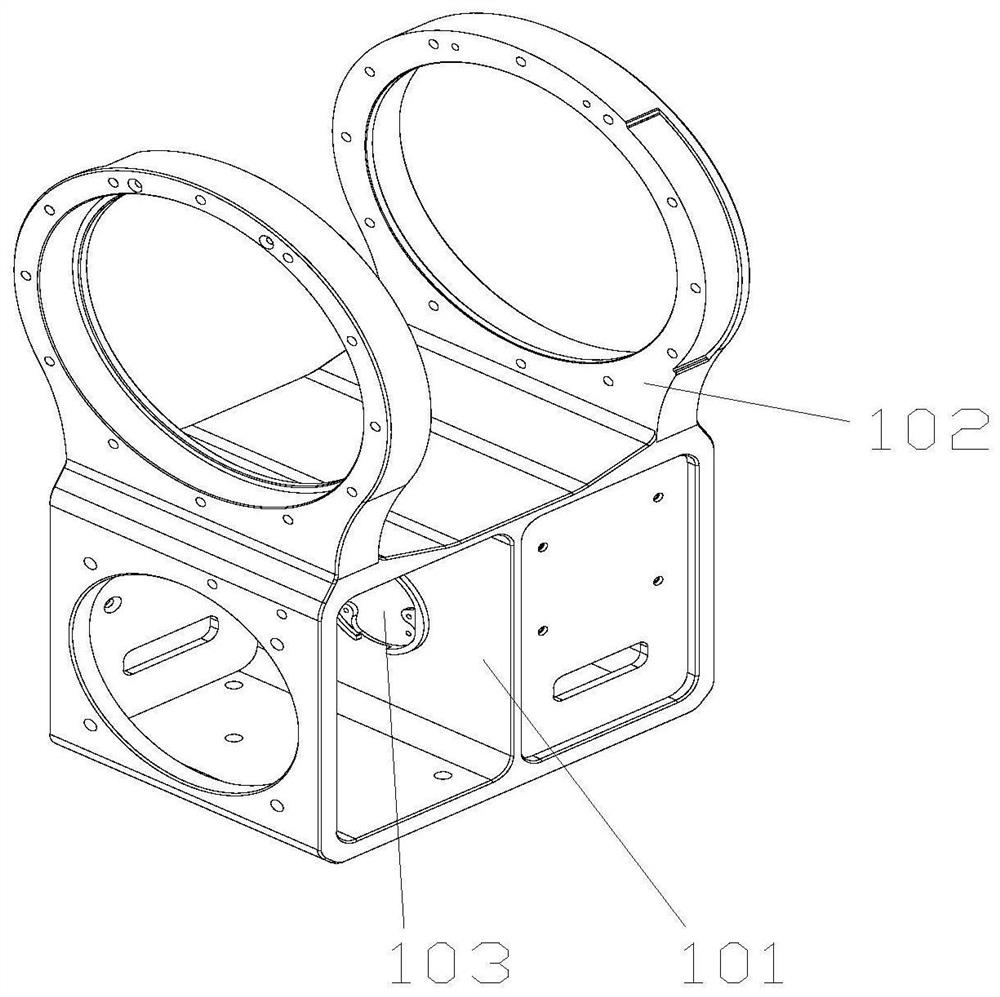
[0021] The first power source is exactly the same as the second power source, both driven by electric drives. The first power source and the second power source respectively include a motor, the motor is a frameless motor, the motor is covered with a motor housing 5, the motor housing 5 is fixed in the bracket 1, and the bottom of the motor is connected to the bracket 1 through a brake structure. The bracket 1 includes a body, which is provided with two cavities, the first power source and the second power source are respectively plac...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com