


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Demonstration system based on mobile industrial robot demonstrator and demonstration method thereof
A technology of industrial robots and teaching devices, which is applied in the direction of manipulators, manufacturing tools, program control manipulators, etc., can solve the problems that teaching flexibility and automation cannot be guaranteed, and there are few matching embedded intelligent teaching systems. Improve machine interaction experience, improve operation adaptability, and improve the effect of teaching function
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
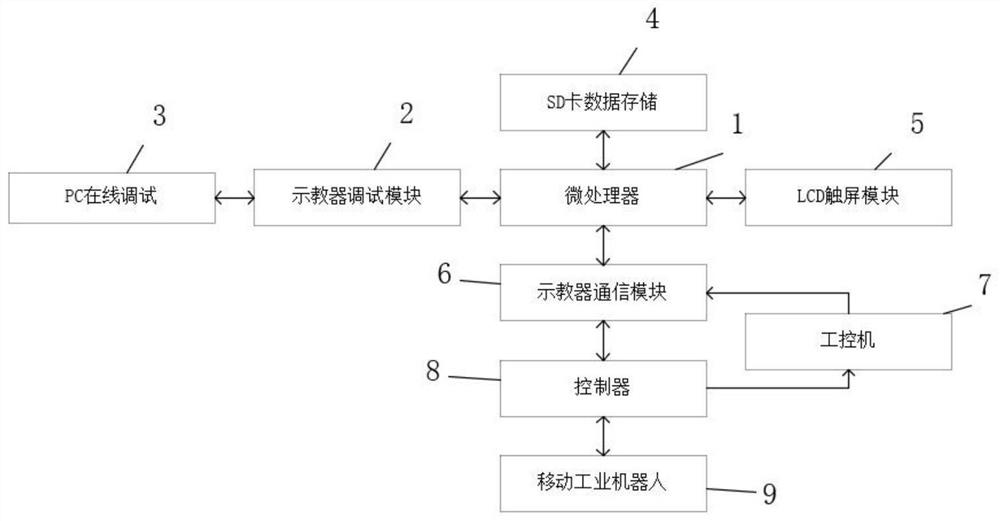
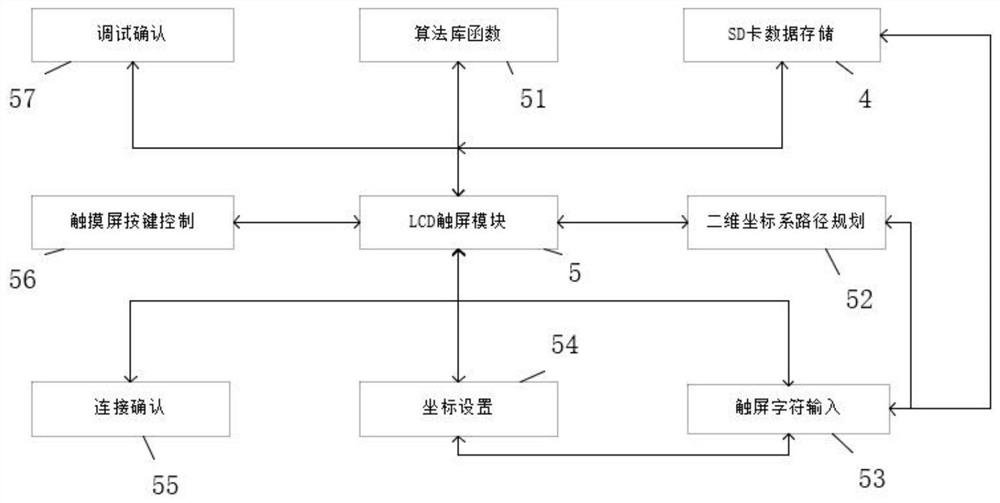
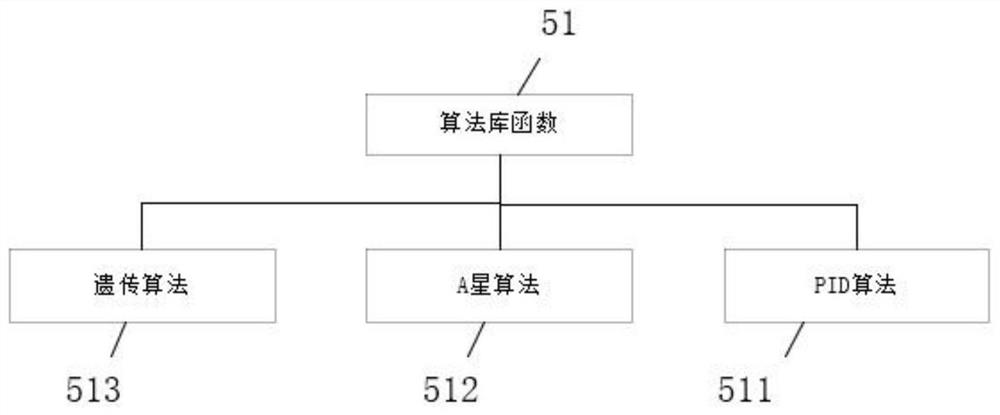
[0035] refer to Figure 1-7 shown. The mobile industrial teaching robot system according to the present invention comprises: a microprocessor (1), and the teaching pendant debugging module (2) is carried on the control board where the microprocessor (1) is the task scheduling and matching core of the teaching pendant system; The PC online debugging (3) is connected with the microprocessor (1) through the teaching pendant debugging module (2) to realize the download and function debugging of the functional program of the teaching pendant system; the SD data storage module (4) is mounted on the microprocessor The core board where the device (1) is located realizes the storage of coordinate data during the teaching process of the teaching pendant system; the LCD touch screen module (5) is mounted on the core board where the microprocessor (1) is located to realize the main interactive function algorithm library functions (51) Selection of type PID algorithm (511), A star algorit...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com