Path tracking method for mobile robot
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0031] The specific implementation of the present invention will be described in further detail below by describing the embodiments with reference to the accompanying drawings, so as to help those skilled in the art have a more complete, accurate and in-depth understanding of the inventive concepts and technical solutions of the present invention.
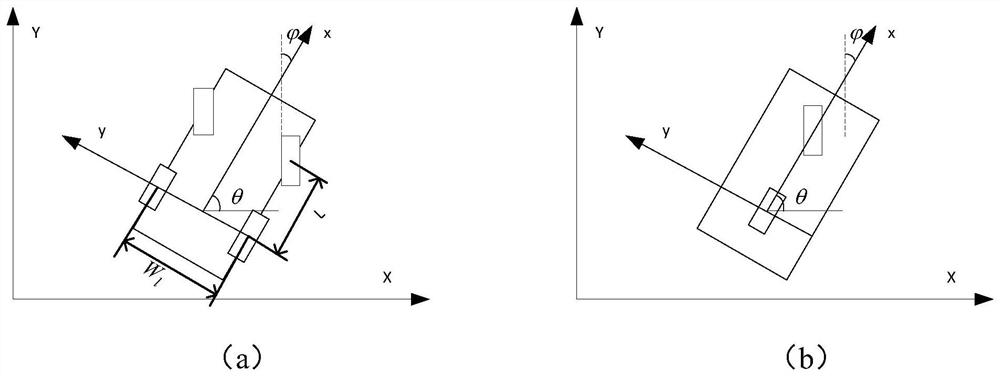
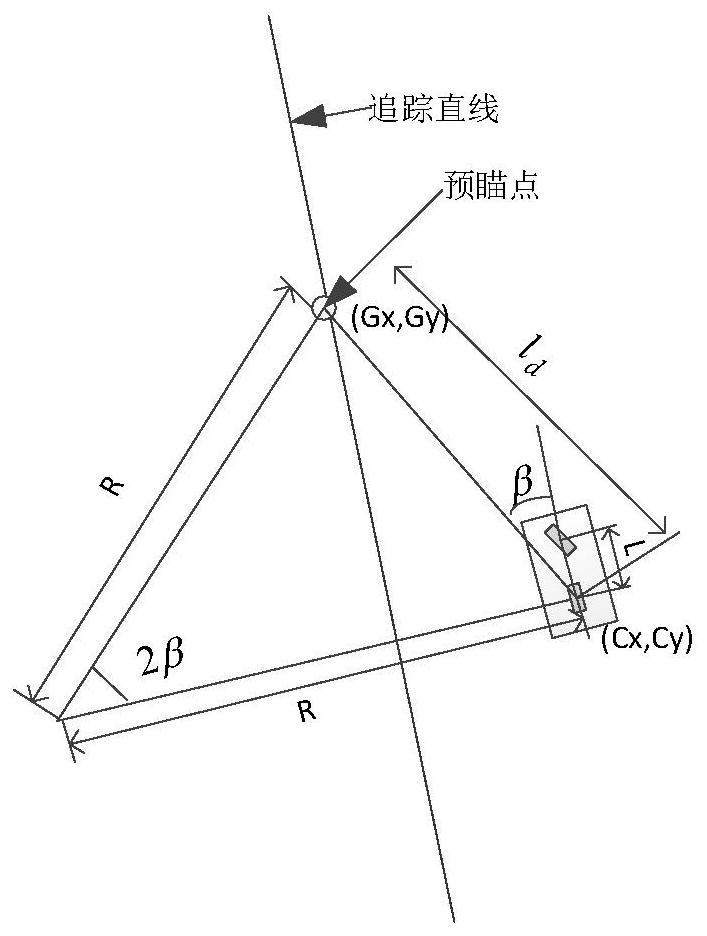
[0032] The present invention proposes a path tracking method for a mobile robot. After planning the expected path according to the tasks that the car needs to perform, the path is divided into point sets, and the straight line that the vehicle needs to track is determined according to the speed of the car, and the straight line is calculated and tracked. After determining the linear velocity, the Pure Pursuit algorithm is used to calculate the control amount of the mobile robot's rotation angle according to the position and orientation of the vehicle body and the position deviation of the preview point, so as to realize the tracking ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com