Simple and convenient nuclear magnetic resonance gradient waveform distortion pre-correction method
A technology of nuclear magnetic resonance and waveform distortion, applied in magnetic resonance measurement, measurement using nuclear magnetic resonance image system, measurement of magnetic variables, etc., can solve the problems of prolonging scanning time, long measuring time, difficult to measure accurately, etc., and shorten scanning Time, stable and reliable results
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
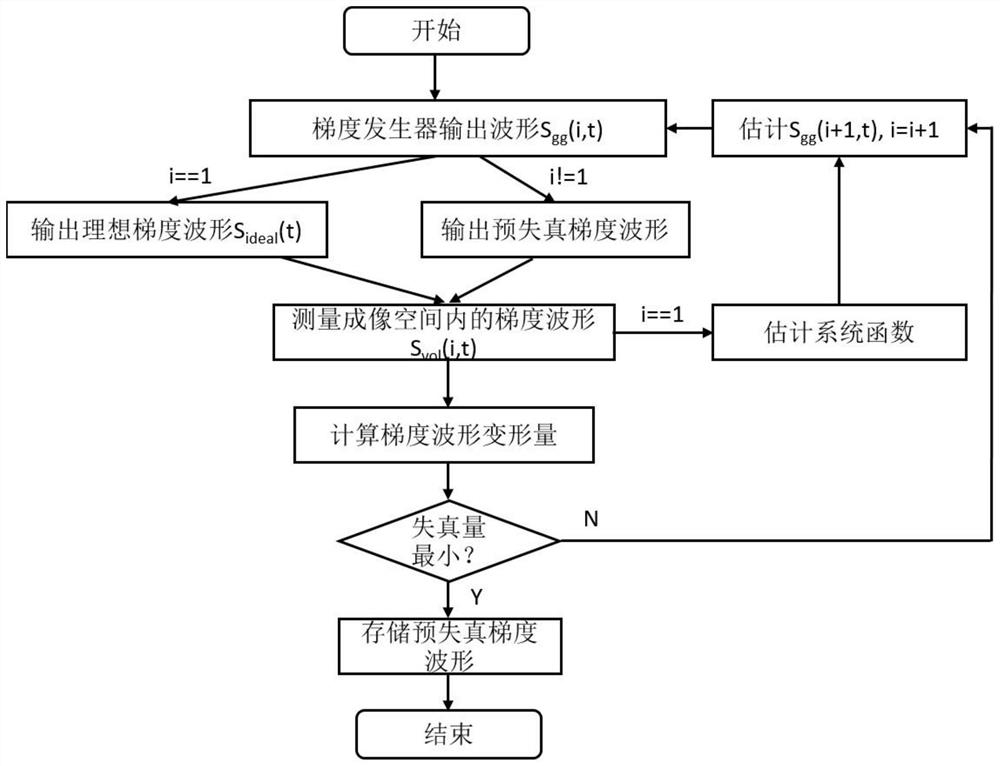
[0034] Such as figure 1 As shown, the flow chart of the gradient waveform distortion pre-correction method of the present invention is as follows figure 1 As shown, its essence is an iterative optimization process.
[0035] A simple NMR gradient waveform distortion pre-correction method, comprising the following steps:
[0036] (1) In the first step of rectification (iteration times i=1), first load the ideal gradient waveform in the gradient generator, that is, S gg (i=1,t)=S ideal (t), the gradient waveform is distorted after passing through the gradient system, and the gradient waveform S in the imaging space is measured by the MRI sequence method vol (i=1,t), according to S vol (i=1,t) and S ideal (t) can roughly estimate the system response of the gradient system in a certain frequency band, and obtain the approximate system impulse response h(t). Using the linear time invariant (LTI) characteristic of the gradient system, the system can be estimated by formula (5) ...
Embodiment 2
[0053] This embodiment is basically the same as Embodiment 1, the difference is that in step (1), according to S vol (i=1,t) and S ideal (t) The system response of the gradient system in a certain frequency band can be roughly estimated. For the trapezoidal wave, the differential operation can be directly performed on the gradient waveform, namely:
[0054] h(t)≈c arb *D(S vol (i=1,tramp )) (4)
[0055] Among them, c arb is the normalization constant, T ramp You can choose a certain gradient platform time after the rising edge according to the actual situation, just pay attention to avoid the influence of the gradient falling edge, h(t) is the approximate system impulse response. This estimation method is more accurate when the gradient climbing rate is high and the gradient plateau time is long.
Embodiment 3
[0057] This embodiment is basically the same as Embodiment 1 or 2, except that in step (3), the gradient system response is estimated in each iteration to obtain the system impulse response h(t).
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com