Wearable walking aid robot
A walking-assisting robot and wearable technology, applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as easy to fall, inaccurate handling of intermediate phases, inability to adjust and switch, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0011] The specific implementation manners of the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
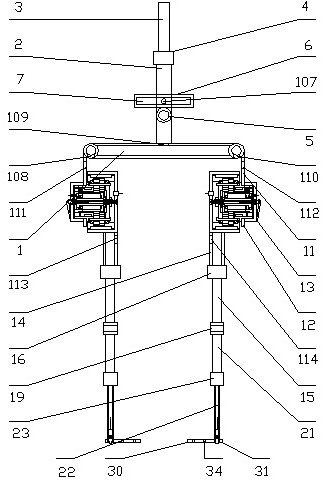
[0012] exist Figure 1-Figure 5Among them, the back bracket is provided with a U-shaped pipe frame 1, a straight pipe 2 is welded in the middle of the upper end of the U-shaped pipe frame, and an upper adjustment pipe 3 is inserted into the straight pipe. The upper adjustment pipe can be adjusted up and down in the straight pipe, and the upper end of the straight pipe is provided with an upper Tighten the sleeve 4, weld the short tube 5 at the rear end of the straight tube, weld the battery box 6 at the upper end of the short tube, and set a lithium battery pack 7 in the battery box, the short tube and the battery box are used for the load bracket, and the upper end of the battery box is a bracket The platform, the bracket platform places the backpack load 8, the front end of the U-shaped pipe frame is p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com