Reward function establishing method based on walking ratio trend change
A technology of reward function and establishment method, which is applied in the field of robotics, can solve problems such as inability to reinforce learning sparse rewards, low efficiency of reinforcement learning, complicated process, etc., to improve adaptability, avoid blind exploration, and enhance robustness Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0046] Embodiment: a kind of reward function establishment method based on walking ratio trend change, it is characterized in that it comprises the following steps:
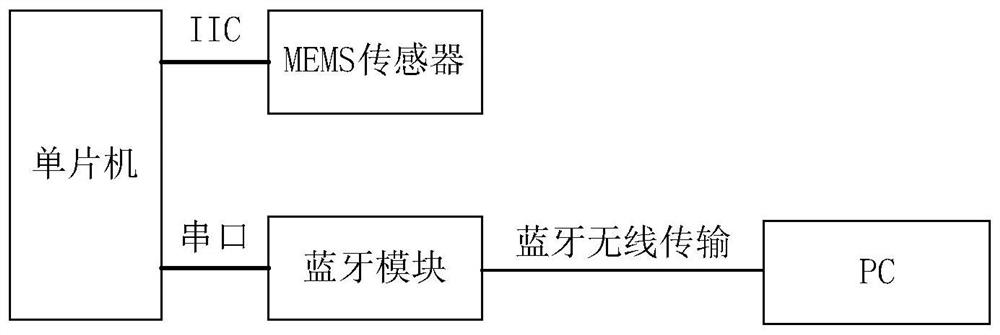
[0047] (1) Use the MEMS attitude sensor to collect the hip joint flexion angle parameter signal of the wearer of the flexible exoskeleton robot, and find the maximum flexion angle θ of the hip joint max and the minimum buckling angle θ min , if it is known that the leg length of the wearer of the flexible exoskeleton robot is l, then the step length D of the wearer of the flexible exoskeleton robot can be obtained;
[0048] D=l(θ max -θ min ) (1)
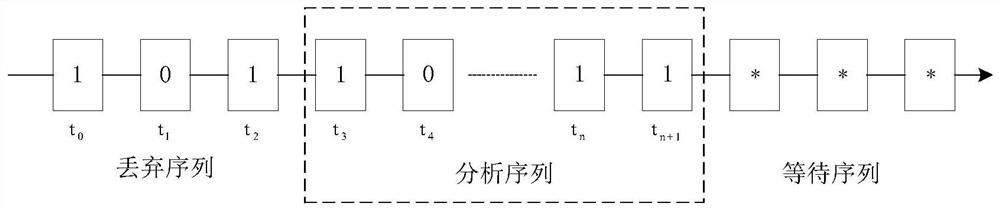
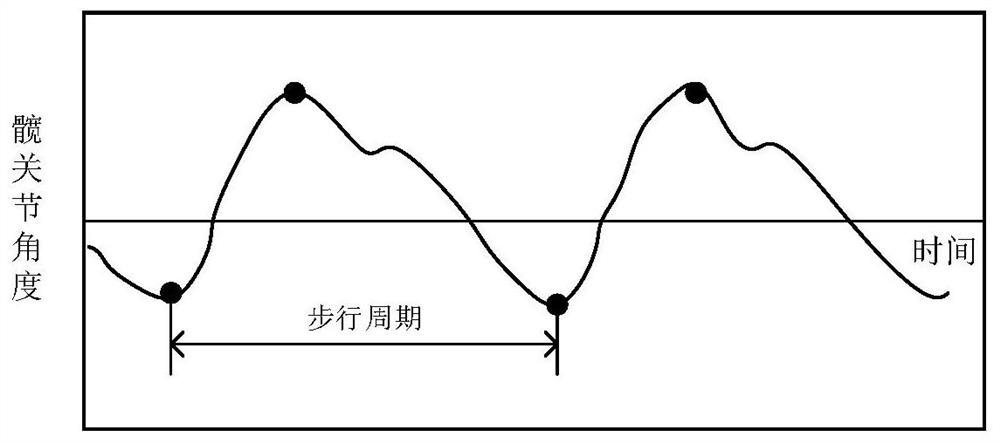
[0049] (2) Place the MEMS attitude sensor in the middle of the back of the left and right thighs of the wearer of the flexible exoskeleton robot, and collect the hip joint flexion angle parameters of the wearer during normal walking in real time to obtain the wearer's hip joint flexion angle parameters curves, such as figure 2 As shown, record the trough time as ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com