A Leg-Foot Mechanism of a High-performance Bionic Footed Robot
A robot and high-performance technology, applied in the field of hexapod robots, can solve problems such as inability to adjust according to actual use requirements, complex foot installation structure, and inconvenient users, and achieve the effect of simple structure, convenient replacement, and strong practicability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
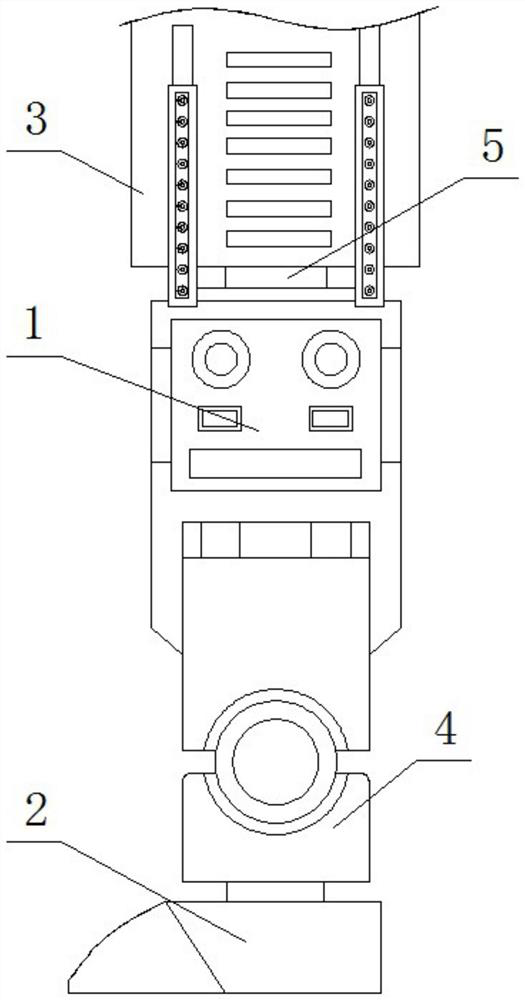
[0032] see Figure 1-5 , the present embodiment provides a leg-foot mechanism of a high-performance bionic footed robot, a leg-foot mechanism of a high-performance bionic footed robot, comprising a mechanical leg 1 and a mechanical foot 2, the bottom of the mechanical leg 1 is fixed Mounting base 4 is installed, mechanical foot 2 is detachably and fixedly installed on the bottom of mounting base 4, the top of mechanical leg 1 is slidably connected with lifting block 3, and the bottom of lifting block 3 is provided with lifting assembly.
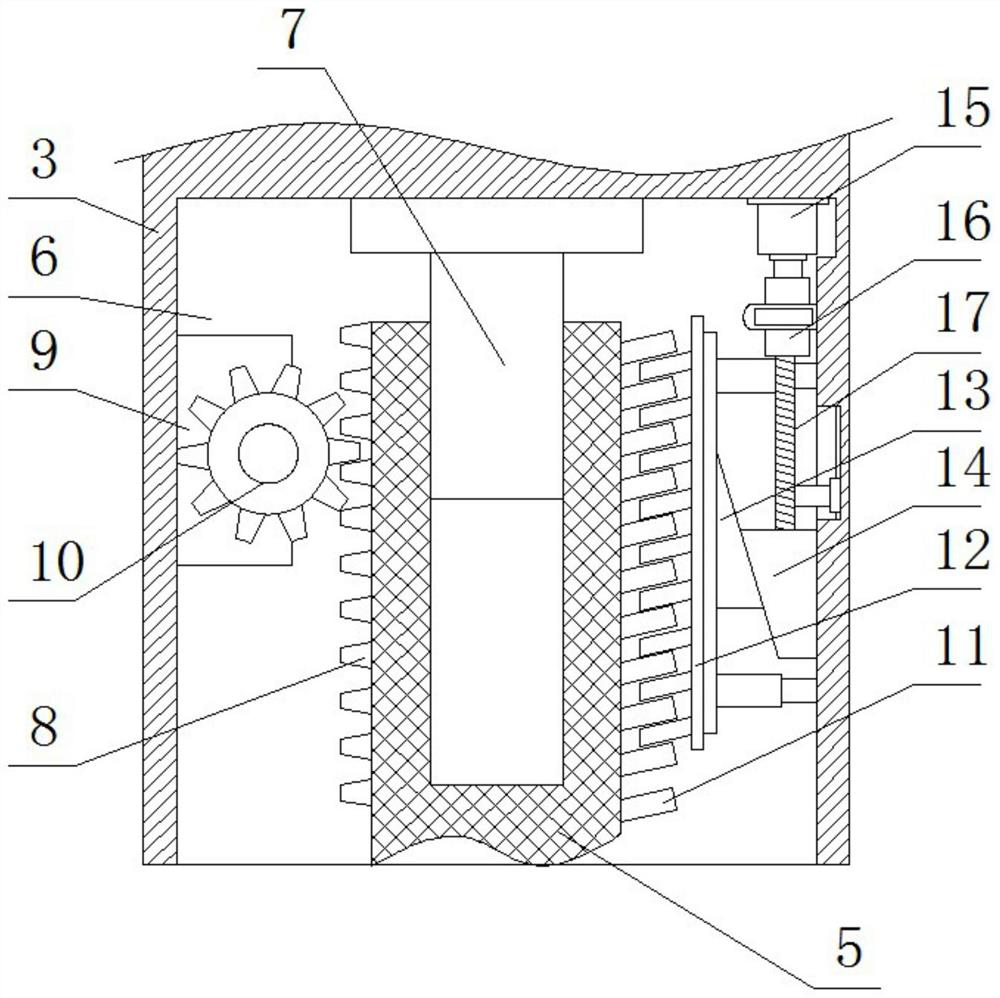
[0033] Among them, the lifting assembly includes an adjustment groove 6 provided at the bottom of the lifting block 3, a slide bar 7 is fixedly installed on the top inner wall of the adjustment groove 6, and the bottom of the slide bar 7 is slidably connected with the lifting rod 5, and the bottom of the lifting rod 5 and the mechanical leg The top of the part 1 is fixedly connected, one side of the lifting rod 5 is fixedly installed with a d...
Embodiment 2
[0038] see Figure 1-5 , made further improvement on the basis of embodiment 1:
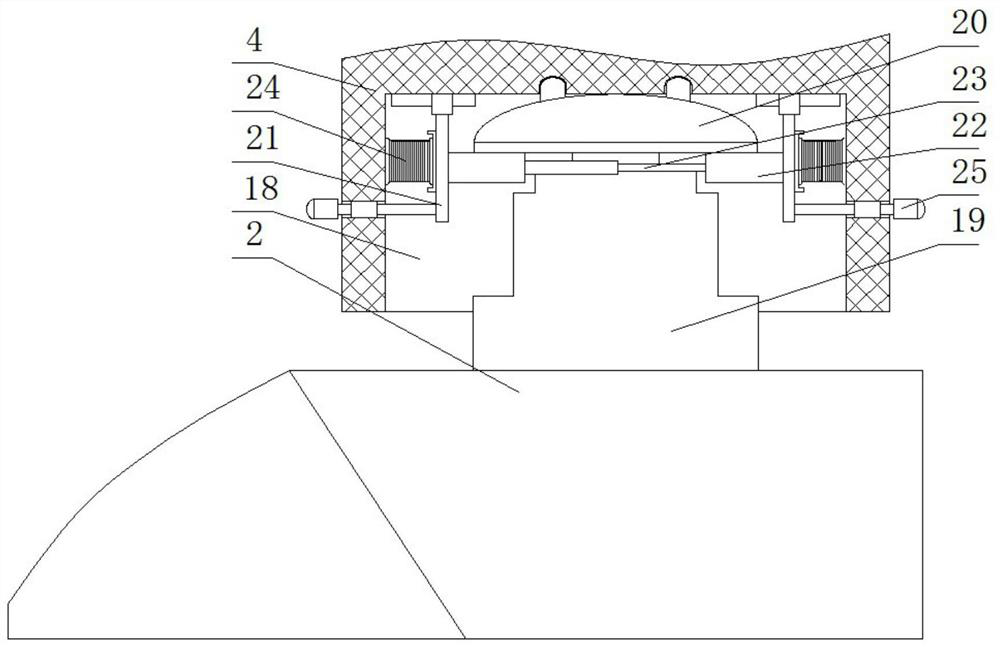
[0039] In this embodiment, the sides of the two push plates 21 away from each other are respectively fixed with pull rods 25, and the two pull rods 25 respectively pass through the inner walls on both sides of the two mounting grooves 18 and extend to both sides of the mounting seat 4, 25 is convenient to pull push plate 21 to move.
[0040] In this embodiment, a slider is fixedly installed on the top of the push plate 21, and two symmetrically arranged slide rails are fixedly installed on the top inner wall of the installation groove 18, and the two sliders are respectively slidably connected with the two slide rails. The blocks and slide rails can make the push plate 21 move in a straight line all the time without offset.
[0041] In this embodiment, the telescopic rod 23 includes a first sleeve and a second sleeve, and the first sleeve is sleeved on the outside of the second sleeve and is sl...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com