Mechanical limiting exoskeleton robot joint
An exoskeleton robot and joint technology, applied in the field of robots, can solve the problems of low safety and reliability of wearable robots, no mechanical limit design for joint rotation, small joint angular motion range, etc., so as to improve safety and reliability. flexibility, wide application range, and the effect of improving the driving torque
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The present invention will be further elaborated below in conjunction with the accompanying drawings.
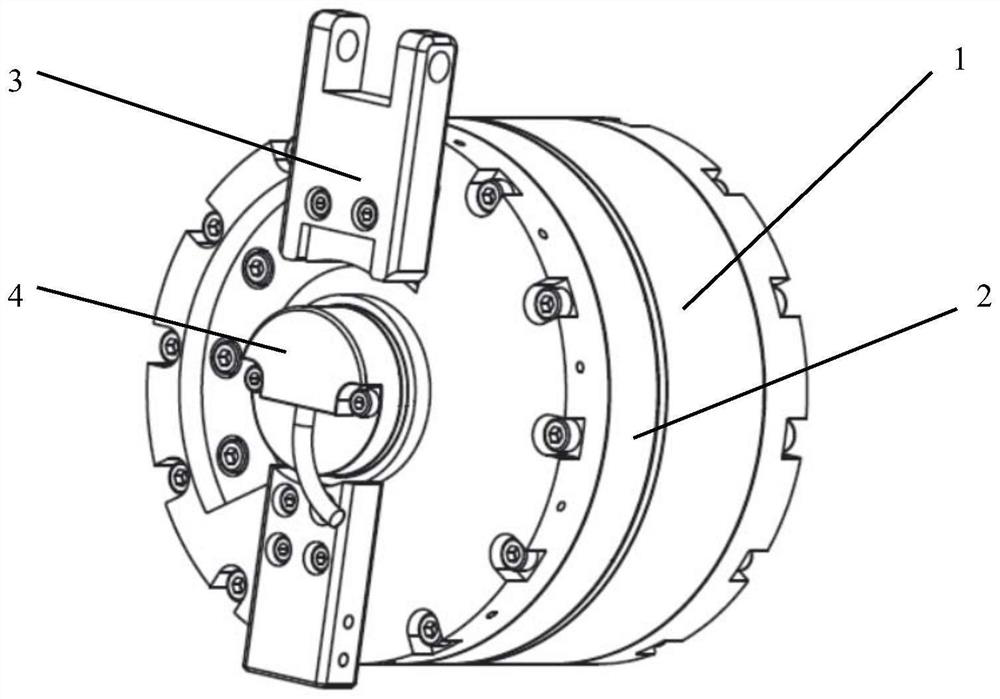
[0031] The present invention is an exoskeleton robot joint with mechanical limit, including a drive mechanism 1, a deceleration mechanism 2, an actuator 3 and a feedback mechanism 4. After the deceleration mechanism 2 decelerates the drive mechanism 1, it drives the actuator 3 to move, and passes through Feedback mechanism 4 records the absolute value and relative value of motion, such as figure 1 shown.
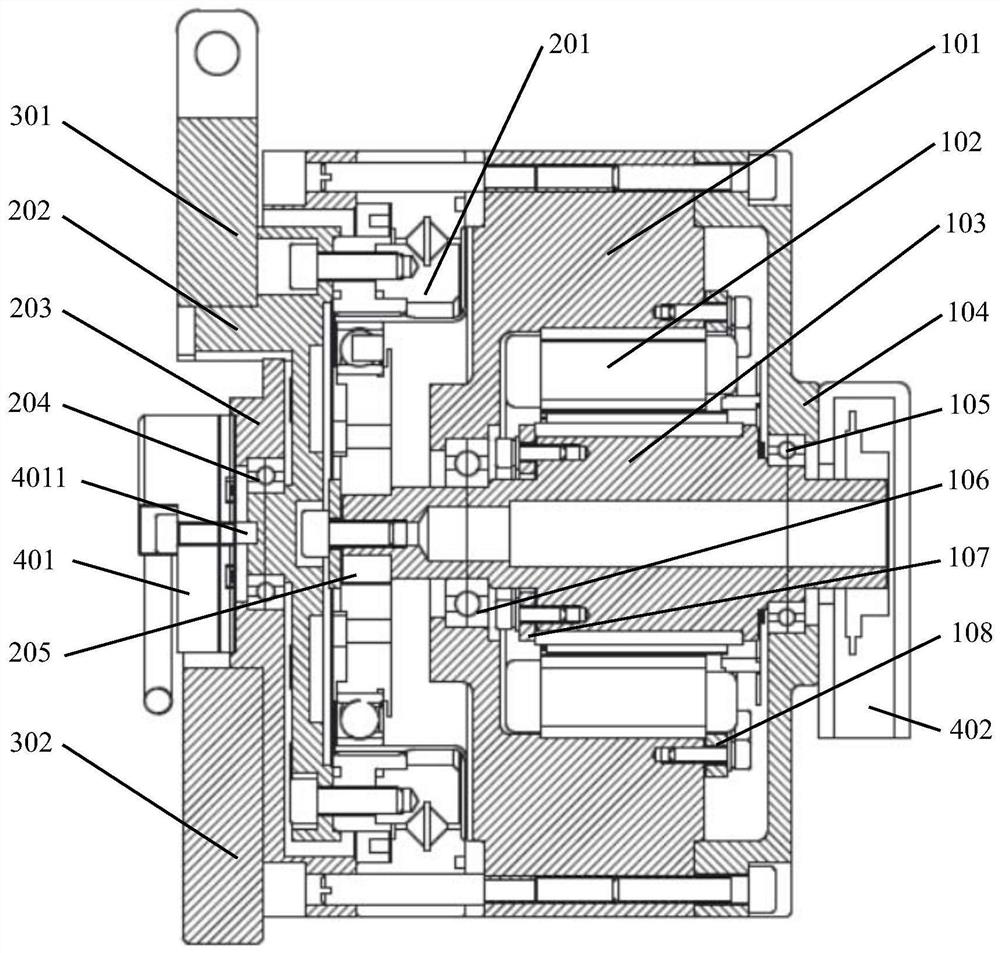
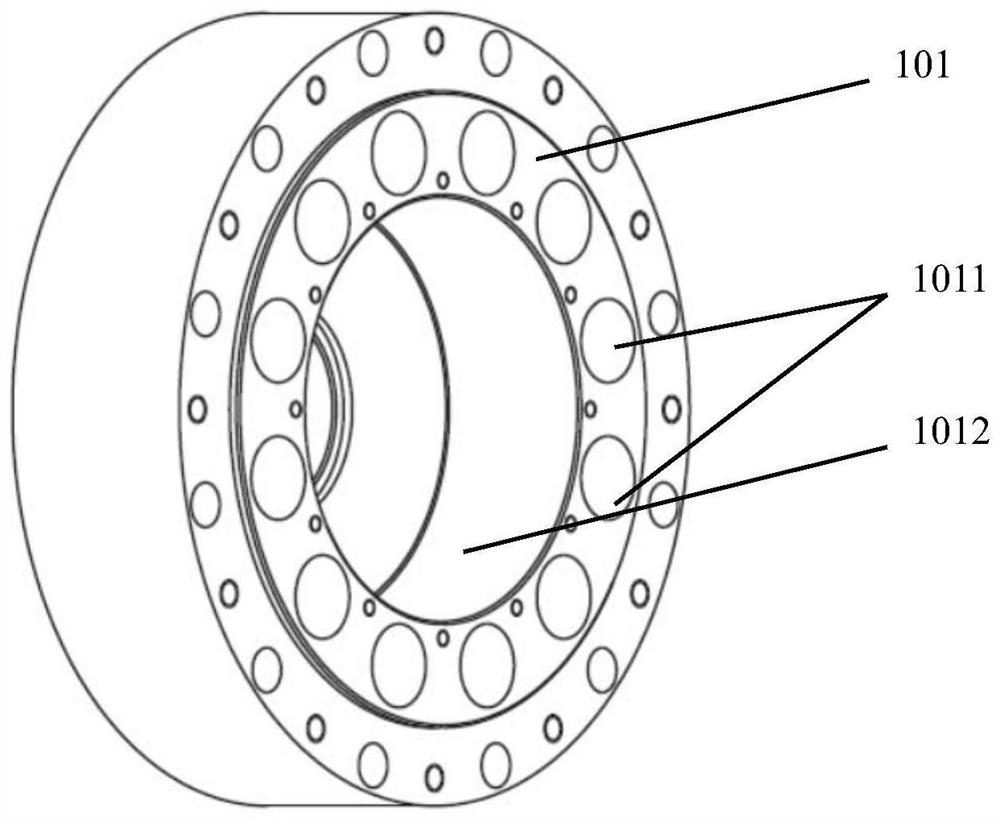
[0032] Such as figure 2 As shown, the driving mechanism 1 includes a motor base 101 , a motor 102 , a rotating shaft 103 , a rear end cover 104 , a first bearing 105 , a second bearing 106 , a rotor retaining ring 107 and a stator retaining ring 108 . Such as image 3 As shown, the motor base 101 is a revolving body structure, the end face is designed with a lightening hole 1011, and the center is processed with a motor installation hole 1012. The stator of the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com