Excrement cleaning robot intelligent navigation method, device and system, medium and equipment
A technology of robot intelligence and navigation method, which is applied in the direction of measuring devices, control/regulation systems, instruments, etc., can solve the problems of high initial cost, no intelligent navigation system, many harmful substances and germs, etc., so as to save labor costs and improve cleanliness The effect of manure efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment 1
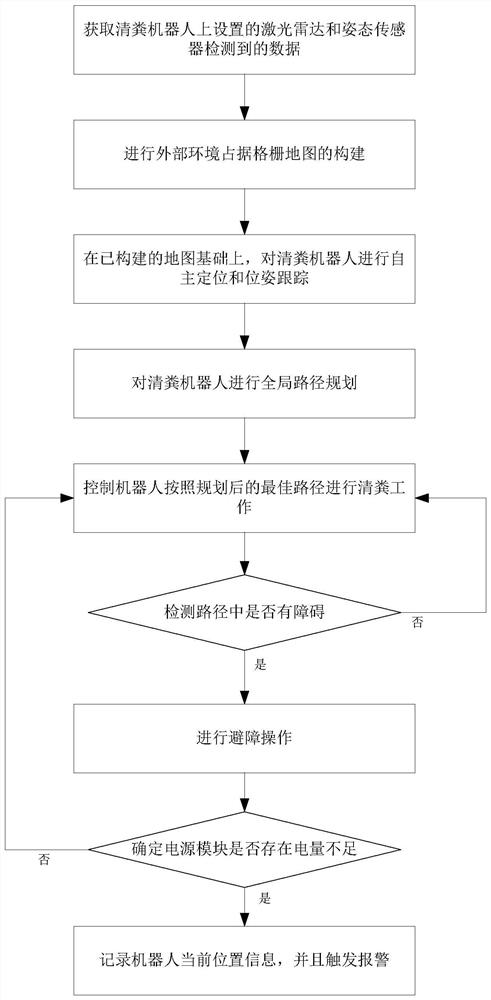
[0071] The present embodiment discloses an intelligent navigation method for a manure cleaning robot, through which the manure cleaning robot is controlled to perform automatic manure cleaning operations in livestock breeding places such as pig houses, so as to realize completely unmanned automatic operation, which is beneficial to animal husbandry hygiene and Disease prevention and control work has brought great help. like figure 1 As shown in, the method of this embodiment includes:
[0072] S1. Obtain the data detected by the laser radar and the attitude sensor set on the manure cleaning robot.
[0073] In this embodiment, the lidar is used to scan the surrounding environment of the manure cleaning robot. Putting the lidar in a transparent acrylic shell can isolate the interference of dust and manure in breeding places such as pig houses without interfering with the radar signal, making the obtained laser data more stable and reliable.
[0074] In this embodiment, the at...
Embodiment 2
[0115] The present embodiment discloses an intelligent navigation device for a manure cleaning robot, which includes an acquisition module, a map construction module, a positioning and tracking module, and a control module. The specific functions of each module are as follows:
[0116] The acquisition module is used to acquire the data detected by the lidar and the attitude sensor set on the manure cleaning robot;
[0117] The map construction module is used to construct the grid map of the occupancy of the external environment according to the data detected by the lidar and the attitude sensor. Specifically, this module constructs the grid map of the occupancy of the external environment based on the Gmapping algorithm.
[0118] The positioning and tracking module is used for autonomous positioning and position tracking of the manure cleaning robot based on the data detected by the lidar and the attitude sensor on the basis of the constructed map. Specifically, this module pe...
Embodiment 3
[0123] This embodiment discloses an intelligent navigation system for a manure cleaning robot, such as image 3 As shown, it includes the upper controller, the lower controller, the lidar, the attitude sensor, the encoder, the infrared sensor and the power module arranged on the manure cleaning robot. The attitude sensor, encoder and infrared sensor are connected to the bottom controller respectively, the lidar is connected to the upper controller, and the upper controller is connected to the bottom controller. specific:
[0124] In this embodiment, the attitude sensor is connected to the underlying controller for detecting attitude information of the manure cleaning robot, and sending the detected attitude information to the underlying controller. In this embodiment, the attitude sensor may be a nine-axis acceleration sensor.
[0125] In this embodiment, the encoder is connected to the bottom controller to transmit the detected signal to the bottom controller, and the botto...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com