Calibration method and system for operating tools
A technique of surgical operation and calibration method, applied in the field of robot-assisted surgical systems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
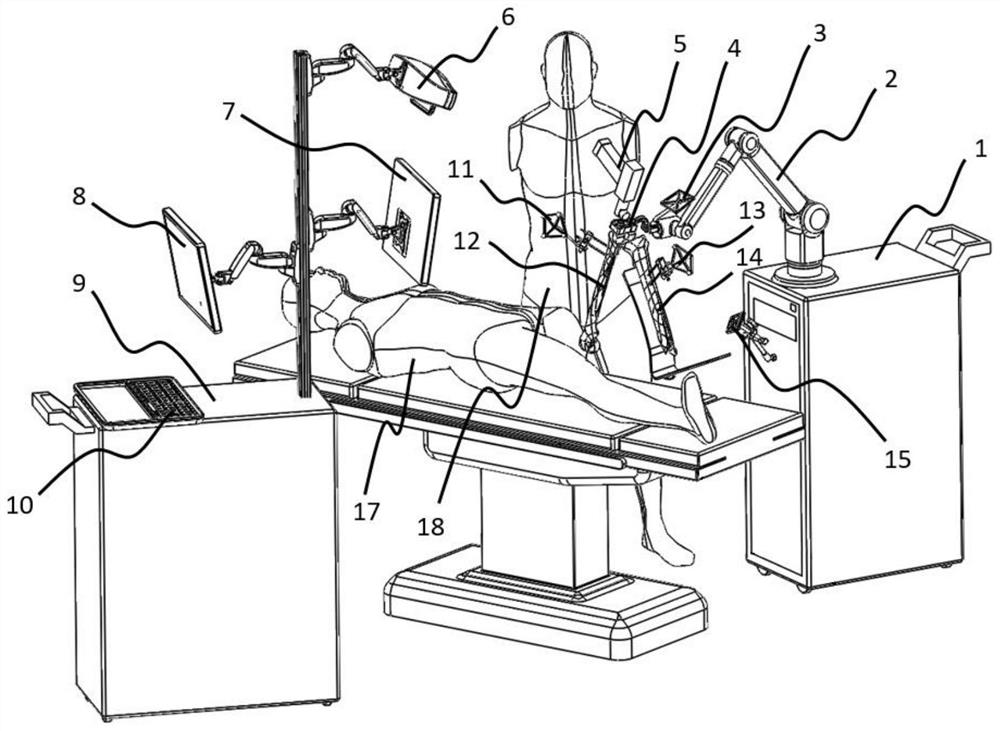
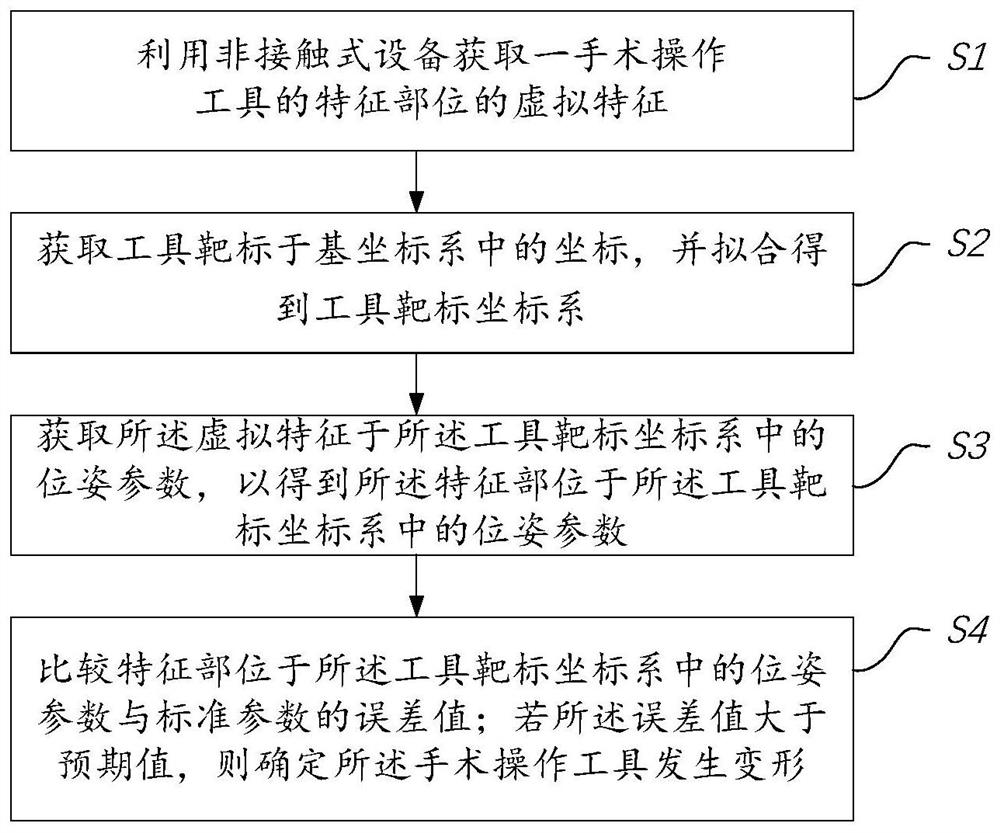
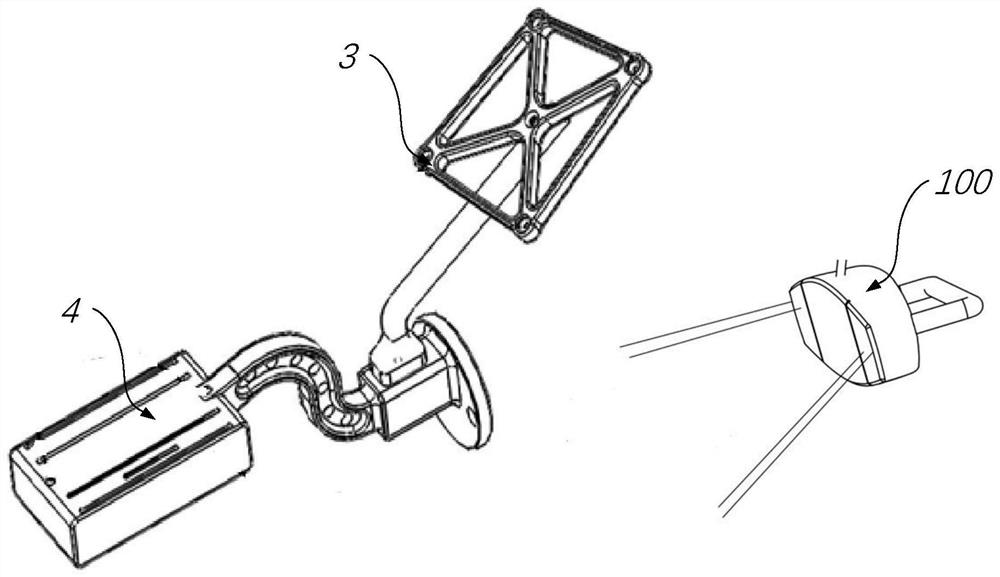
[0060] Please refer to Figure 1 to Figure 4 ,in, figure 1 It is a schematic diagram of performing knee joint replacement using an orthopedic surgery system provided by Embodiment 1 of the present invention; figure 2 It is a flowchart of the verification method provided by Embodiment 1 of the present invention; image 3 It is a schematic diagram of the calibration system of the surgical operation tool provided by Embodiment 1 of the present invention; Figure 4 It is a schematic diagram of the osteotomy guide tool provided by Embodiment 1 of the present invention.
[0061] An embodiment of the present invention provides an orthopedic surgery system, figure 1 What is shown is a schematic diagram of using the orthopedic surgery system to perform knee joint replacement. However, the orthopedic surgery system of the present invention has no special limitation on the application environment, and can also be applied to other orthopedic surgeries. In the following description, a...
Embodiment 2
[0095] Please refer to Figure 5a to Figure 7 ,in, Figure 5a It is a schematic diagram of the transmitting end provided by Embodiment 2 of the present invention; Figure 5b It is a schematic diagram of the receiving end provided by Embodiment 2 of the present invention; Image 6 It is a schematic diagram of the verification system of the surgical operation tool provided by the second embodiment of the present invention, wherein the length of the transmitting end and the receiving end is smaller than the length of the guide groove; Figure 7 It is a schematic diagram of a calibration system for a surgical operation tool provided in Embodiment 2 of the present invention, wherein the length of the transmitting end and the receiving end is not less than the length of the guide groove.
[0096] The verification method and verification system of the surgical operation tool provided by Embodiment 2 of the present invention are basically the same as the verification method and veri...
Embodiment 3
[0108] Please refer to Figure 8 with Figure 9 ,in, Figure 8 It is a schematic diagram of the receiving end provided by Embodiment 3 of the present invention; Figure 9 It is a schematic diagram of the verification system of the surgical operation tool provided by the third embodiment of the present invention.
[0109] The verification method and verification system of the surgical operation tool provided by the third embodiment of the present invention are basically the same as the verification method and verification system of the surgical operation tool provided by the second embodiment, and the same parts will not be described again, and the following only focuses on the differences to describe.
[0110] In this embodiment, the non-contact device includes a through-beam photoelectric module, and the through-beam photoelectric module includes a transmitting end 201 and a receiving end 202, such as Figure 8 with Figure 9 As shown, both the transmitting end 201 and t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com