Semi-online machine-set multi-target tracking method
A multi-target tracking and machine-mounted technology, applied in the field of multi-target tracking, can solve the problems of tracking failure, vehicle judgment lag, and poor real-time performance.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0061] The present invention will be described in detail below in conjunction with the accompanying drawings.
[0062] The present invention adopts the MOT of the semi-online mechanism, and this method can make a good compromise and optimization in terms of real-time performance and precision.
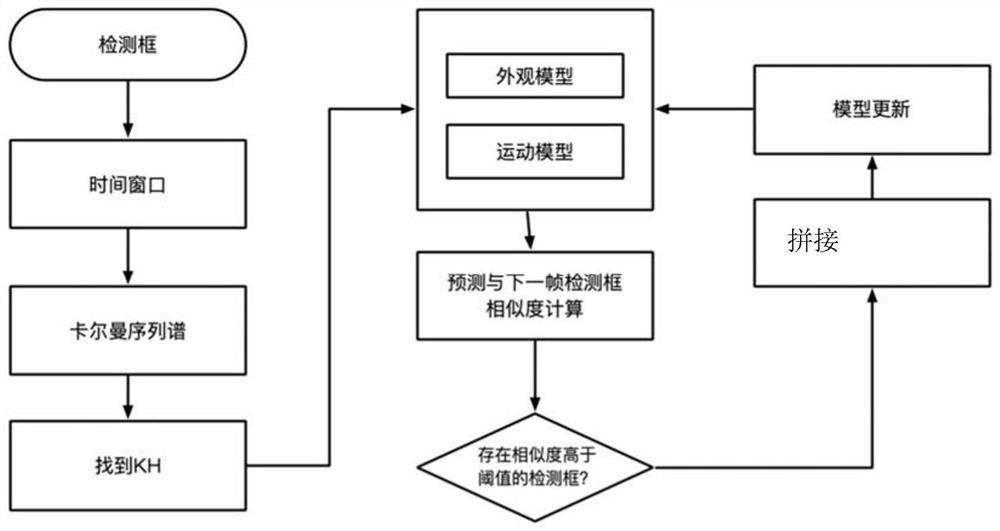
[0063] see figure 1 , the concrete process of the present invention is: adopt the video of pedestrian or moving target that camera shoots, obtain the detection frame of pedestrian or moving target through YOLO-V3 detector, namely to pedestrian or moving target picture frame, exclude other target or background. By collecting a period of video, within a period of time, according to the position change information between the detection frames, the Kalman sequence spectrum is obtained, and then a pair of Kalman heads (Kalman Head, KH) are found according to the Kalman sequence spectrum. The similarity between the model, the motion model and the size change model can be used to obtain the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com