Indoor static sound source positioning method based on swarm robots
A swarm robot, sound source localization technology, applied in the direction of positioning, instruments, measuring devices, etc., can solve the problem of unable to obtain the optimal sound source position, and achieve the effect of simple structure, improved fault tolerance rate, and high positioning accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
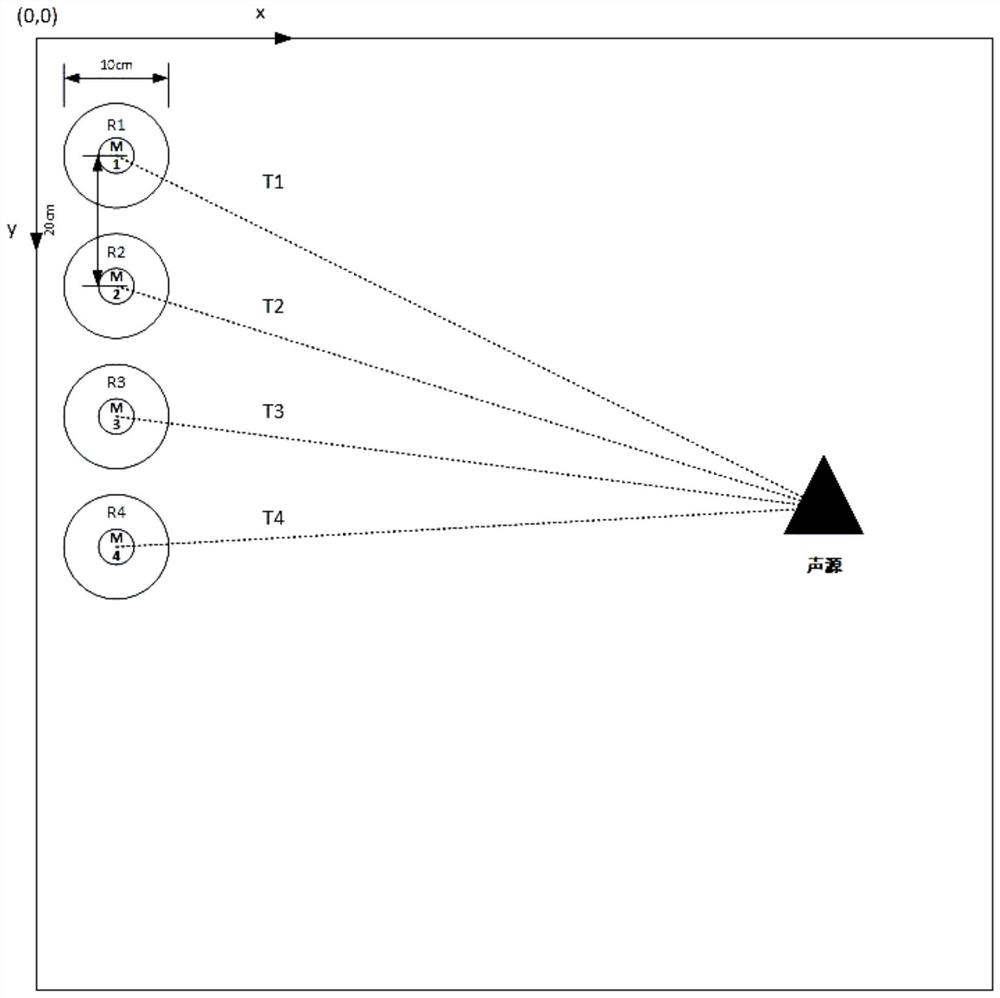
[0098] This embodiment provides a method for locating indoor stationary sound sources based on swarm robots, which is characterized in that the method adopts the steps of the above-mentioned positioning method and the following parameters:
[0099] Assuming that the radius of each robot is 5cm, and the initial relative position of each robot is fixed, let N=2,
[0100] See the table below for other parameters:
[0101] Table 1 parameters
[0102]
PUM
| Property | Measurement | Unit |
|---|---|---|
| Radius | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com