Relying-free positioning and navigation method and device and storage medium
A navigation method and navigation map technology, applied in surveying and mapping, navigation, navigation, measuring devices, etc., can solve problems affecting the safety of unmanned driving systems, GPS positioning drift, high demand, etc., to reduce communication bandwidth requirements, improve efficiency, The effect of avoiding waste of resources
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] The present invention will be described in detail below in conjunction with the accompanying drawings.
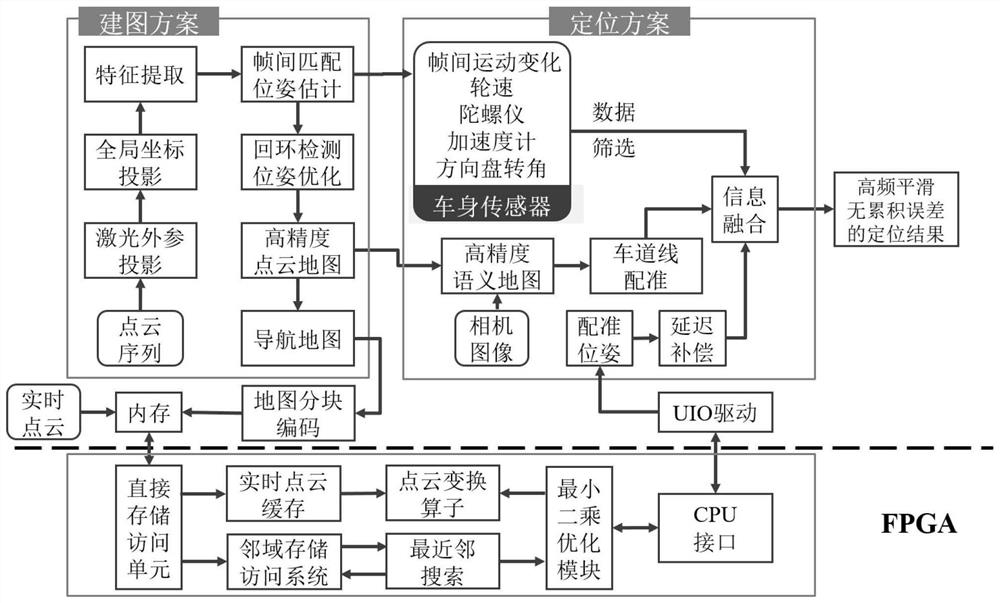
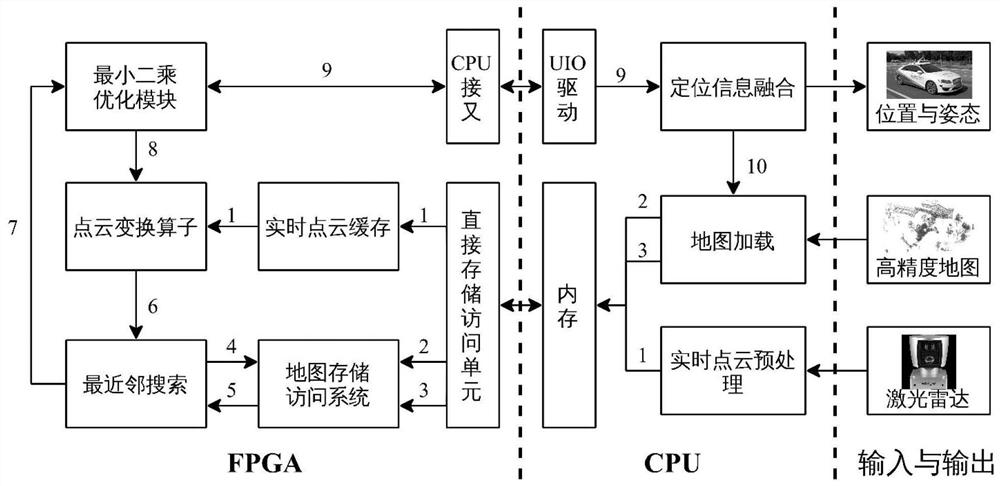
[0037] refer to figure 1 and image 3 , a method for unsupported positioning and navigation, comprising the following steps:
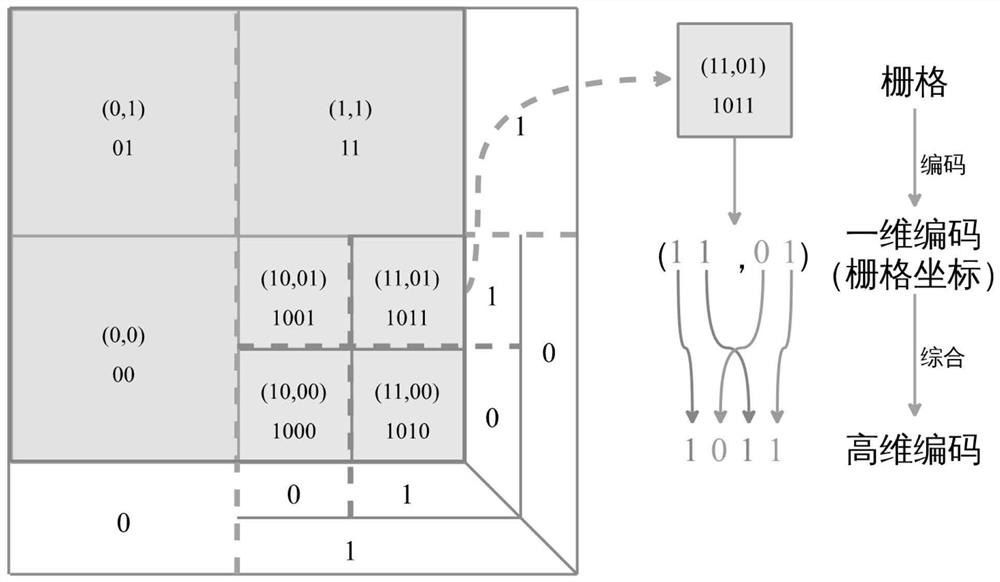
[0038] S100, navigation map construction and map segmentation and coding:
[0039] S101, in terms of map construction, the present invention adopts a synchronous positioning and mapping (SLAM) and inertial navigation system (GPS / DR) collaborative method to construct a high-precision point cloud map, and sequentially through the lidar frame matching and loopback in SLAM The detection and graph optimization algorithm corrects the map of the GPS signal occlusion area to obtain a high-precision point cloud map with greatly improved accuracy and quality and the track information of the unmanned platform in the high-precision point cloud map. For underground Global high-precision map construction can also be achieved in this way for scenarios wi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com