Deep hole inner wall geometric structure detection robot system based on line structure light detection method
A robot system and geometric structure technology, applied in the field of intelligent detection equipment system, can solve problems such as groove detection interference, data acquisition and processing errors, difficult high-precision measurement of geometric structure parameters, etc., and achieve the effect of improving intelligence
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The present invention will be further described below in conjunction with the accompanying drawings.
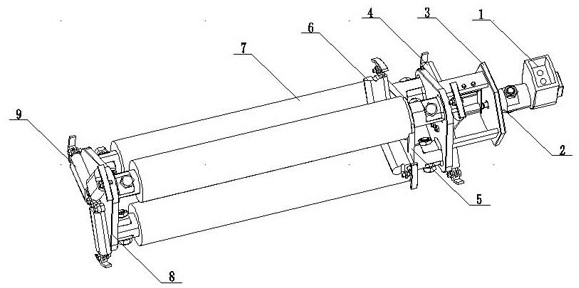
[0028] Such as Figure 1-Figure 10 As shown, the present invention is a deep hole inner wall geometric structure detection robot system based on the line structured light detection method, which includes a detection head 1, a rotating support seat assembly 2, a front support frame 3, and a front support mechanism that are fixedly connected in sequence from the beginning to the end. Foot 4, support plate 5, middle support mechanical foot 6, electric push rod 7, tail support frame 8 and tail support mechanical foot 9.
[0029] When the robot system is in the deep hole, the detection head 1 is used to detect the geometric structure of the inner wall of the spiral groove deep hole workpiece; the front support mechanical foot 4, the middle support mechanical foot 6 and the tail support mechanical foot 9 are used for inspection along the deep hole. Radial tightening or loos...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com