Manipulator Control Method Based on Impedance Control
A technology of impedance control and manipulators, which is applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve the problems of damage to goods or materials to be processed, material impact, and affecting the correct execution of tasks, so as to achieve handling and processing operations, high Effect of precision handling and machining operations
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
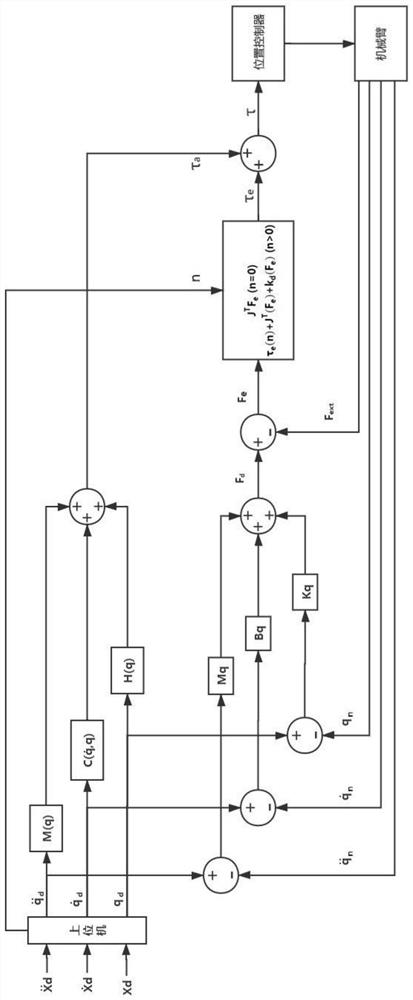
[0023] The impedance control-based robotic arm control method described in this embodiment, such as figure 1 As shown, it includes the use of a mechanical arm with an end effector and a position controller and a host computer for inputting and calculating parameters. The end effector is equipped with a position sensor, a speed sensor and a force sensor, and performs the following step:
[0024] a. Input the desired pose X required by the end effector to the upper computer d , the host computer according to the desired pose X d With the current pose parameters of the manipulator, calculate the movement of the manipulator to the desired pose X d required desired speed and the desired acceleration
[0025] b. Desired pose X d , expected speed and the desired acceleration Calculate the desired joint variable q needed to drive the arm d , And calculate the expected control torque according to the dynamic formula:
[0026]
[0027] Among them, M(q d ) is the joi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com