Self-propelled full-coverage multi-target safflower filament picking robot
A picking robot and full coverage technology, which is applied to picking machines, harvesters, agricultural machinery and tools, etc., can solve the problems of low safflower picking efficiency and the inability to achieve full coverage of safflower plant fruit balls, and achieve the goal of improving picking efficiency Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0091] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
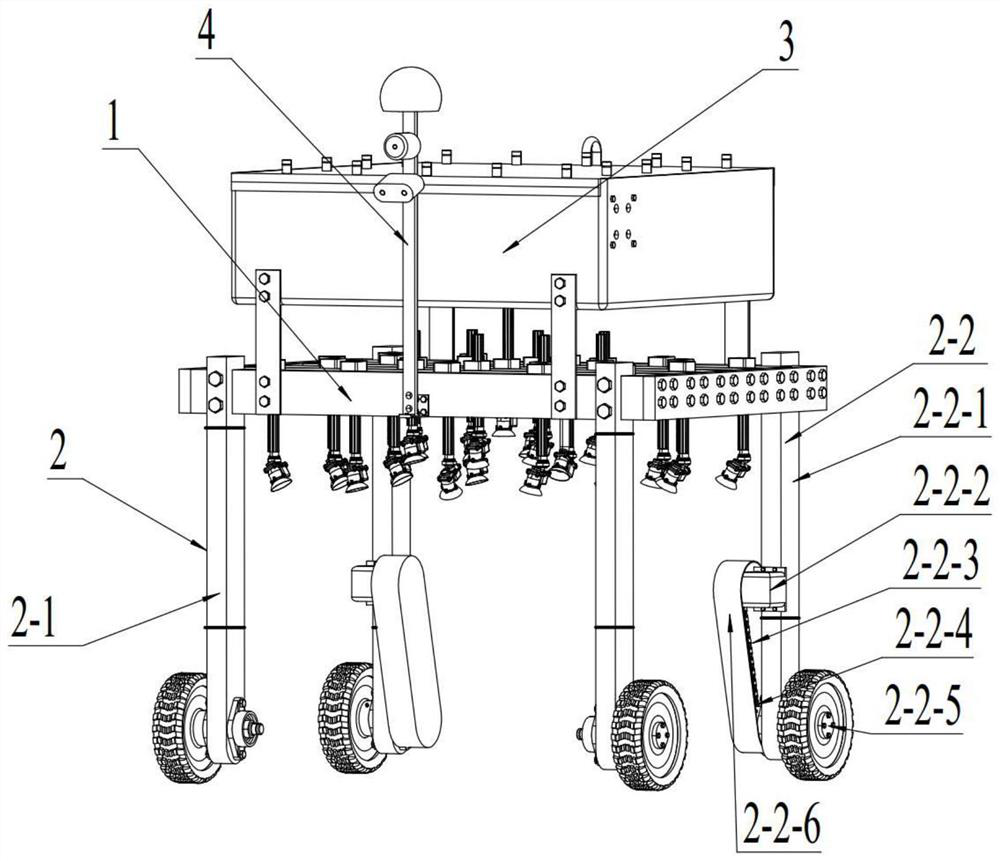
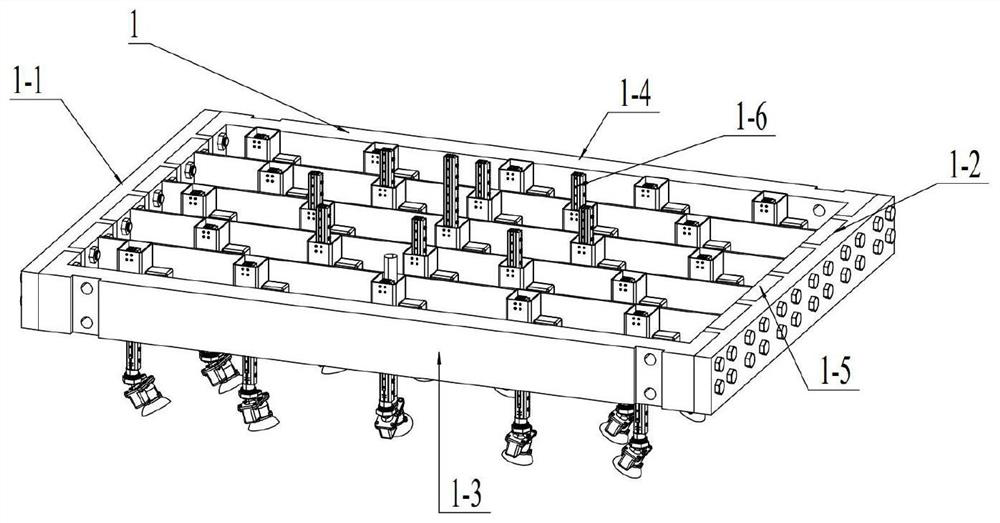
[0092] Such as figure 1 As shown, a self-propelled full-coverage multi-target safflower filament picking robot includes a picking manipulator guide frame 1, a walking device 2, a filament collection system 3, and a multi-information fusion filament positioning, navigation and identification system 4.
[0093]The four walking devices 2 are fixedly connected to the four corners of the horizontally arranged rectangular picking manipulator guide frame 1 in a height-adjustable manner, so that the rectangular picking manipulator guide frame 1 is located above the safflower plant during picking operations; the filament collection system 3 is fixedly connected above the picking manipulator guide frame 1; the multi-information fusion filigree positioning and navigation identification system 4 is fixedly connected to the front end of the picking manipulator guide...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com